Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Purdue SIGBots Wiki works to provide VEX Robotics competitors at all skill levels with a wealth of community-driven knowledge that has been developed over a rich history of BLRS competition and work within the community. We also envision a place for students to share what they have learned, and host a location for learning to begin, and grow.
With this Wiki, we seek to centralize the wealth of information between generations of robotics students in one location. Many of these articles have been passed down in the Purdue SIGBots internal documents and have been updated for public usage.
By making this project open-sourced, we can help expand this knowledge base with diverse viewpoints and sources. For more information on how you can help, check out our contributing guidelines page.
The VEX community is one that is better together, we believe that the increased sharing of knowledge that is accessible to every team will bring about better robots and, most importantly, better engineers.
Thank you,
The SIGBots Wiki Development Team
The wiki was created to host the knowledge of the VEX community with resources for competitors at all levels. It started with years of SIGBots documentation but has expanded with many open-source contributors, and new articles always being added. The wiki will stay up to date with new knowledge and continue to strengthen the articles already published.
If you are interested in contributing to the wiki feel free to open a pull request on the wiki's repo. Simply click edit on GitHub on any of the pages to see where in the repo that specific page is. We also allow contributions by PDF and Word Documents, so check it out under contributing guidelines.
If you would like to discuss or bring up an issue with the wiki without fixing it yourself, feel free to open up an issue on the aforementioned wiki repo.
As always if you have any questions or concerns feel free to contact us at: [email protected]. Please CC your coach in the email to help us assist you more effectively.
This work is licensed under a Creative Commons Attribution-ShareAlike 2.0 Generic License.
Outside of general building knowledge and subsystem variations, there are many different uses for the wealth of parts used in constructing a VEX robot.


This is an archive of links to the VODs of previous VEX worlds competitions
This section is currently broken and we are currently working on a more future proof solution for fixing these year to year. Currently, Worlds 2024 links still work. Stay tuned!
If you have any proposed solutions for this other than replacing the links when they break, please do!
Learn about all of the different engineering and design principles that go into a robot.
Do you even lift bro?
As a VexU team, volunteering at local VRC events does 2 things. Firstly, it allows you to learn a lot about how competitions work, hoa the judging process works, and gives hands on experience with the game since VexU teams compete less. Secondly, RECF has made it so that VexU teams are able to compete in the Robot Skills Challenge at VRC events allowing their score to be updated on the global standings. This makes it possible for teams to improve their skills score and qualify for the world championship without traveling to a VexU competition.
The Purdue SIGBots Wiki provides access for contributors without the ability to create markdown documents with this google form. Please note that this does not guarantee that your article will be accepted, and we may make revisions to the original article for different reasons. All contributing guidelines still apply. All content submitted through this form will be considered SIGBots Wiki property, but we will try to attribute teams for their work.
Direct Link: https://forms.gle/La5r4CVCzxH2wnb67
The Purdue SIGBots Wiki uses Github integration for contributing, moderation, and general version control. It uses Github markdown for formatted text in our articles, and a guide for this can be found More on using Github for version control.
If you are looking to contribute and don't know where to start, a good place to look is the projects and issues section on our github page!
To make a modification to an article or create a new article, submit a pull request (PR) on our github page which can be found .
Submitting your Pull Request will allow the SIGBots Wiki Development team to review and process any changes proposed.
Please include:
Why your proposed changes should be made.
What changes are being proposed.
Include you or your team on the bottom of the page in the list of contributors (make a new section on your new page if you created a new page).
Try to avoid slang in general and region specific terms for mechanisms.
Example: "Goliath Intakes" as a nickname for roller intakes.
If a term is widely used, but has an unprofessional connotation please refrain from using it.
Mentioning outside sources and other specific teams and their robots are allowed to be mentioned on the wiki, as long as their usage is relevant, respectful, and consensual.
If this is done, please include the source itself with a description and proper embedding for images, videos, and other forms of media.
Tips and Tricks for building good lifts.
Bracing is the act of securing a lift with bars at the base of the lift, between different lift bars, and other places where there may be a need for structural support. Many teams iteratively find some of these areas as they test their design. This article further discusses the two most common types of bracing seen in good lift designs.
Bracing is the most crucial aspect of designing a stable (and fast) lift. It may seem counter-intuitive, but adding weight for a better braced lift can often improve its speed. 2017-18's game ITZ and 2014-15's Skyrise caused a lot of the research into this topic.
X bracing is the most common strategy used in bracing a lift. Structurally, it has strong tension, but not much else. As a result, it works well with 1 hole wide c-channel on the middle of a DR4b, for instance, but using c-channels won't give you much improvement. It also will not prevent twisting, which the main problem plaguing most VEX lifts.
Be sure not to use this strategy with 1x metal, as it will likely have little noticeable impact.
Bracing with horizontal 5 hole wide C-Channels (often doubled up) was a common and very effective technique used by New Zealand teams in 2017-18's ITZ to brace the bottom section of DR4Bs. This is the most effective way to prevent the lift from twisting, and while the doubled 5-by is very heavy, the additional stability causes the lift's joints to be more efficient and the lift to be faster. To make this approach more effective, use shoulder screws to keep holes aligned better.
Joints are commonly used in lifts to reduce slop and friction. See for more info.
RPM, or revolutions per minute, is a measure of the rotational speed of an object. It is defined as the number of complete revolutions an object makes around its axis of rotation in one minute. RPM is often used to describe the speed of mechanical systems, such as motors, gears, and shafts.
The relationship between RPM, torque, and the speed of a shaft is complex and depends on several factors, including the size and shape of the shaft, the type and amount of load being applied, and the efficiency of the system.
In general, the torque required to rotate a shaft increases with the speed of the shaft. This is because the faster an object rotates, the more force is required to overcome the centrifugal forces acting on it. As a result, shafts operating at high speeds typically require higher torque to maintain their rotational motion.
Conversely, the speed of a shaft is directly proportional to the torque applied to it, assuming the load and efficiency of the system remain constant. This means that increasing the torque applied to a shaft will result in an increase in its speed, and decreasing the torque will result in a decrease in its speed.
The RPM and torque of a shaft are important factors to consider in the design and operation of mechanical systems. Engineers must carefully balance these variables to ensure that the system operates efficiently and safely and that the shaft is able to withstand the forces acting on it.
(Purdue SIGBots)
Versatile structural components with a variety of uses.
As barebones as it gets, Plate Metal is a 5x15 or 5x25 hole plate consisting of the standard square VEX bores every 0.5 inches (12.7mm).
Given the lack of flanges on either end of the plate, Plate Metal tends to be flexible along the longer flat face. As such, it is not advisable to use plate metal for any use-cases that require rigidity in that direction - Plate Metal is considerably stronger along the thin edge faces. One of the more common uses for Plate Metal is to cut and form it into custom-shaped pieces, rather than cutting plastic to achieve the same result. Using Plate Metal for this functionality keeps the standard VEX bore spacing, as well as introducing more rigidity compared to VRC-legal plastics.
Plate Metal can be found at .
Similar to Plate Metal, Flat Bars are flat surfaces consisting of the standard VEX square bores, appearing in a 1x25 hole variety.
While not as apt for making custom pieces as Plate Metal, Flat Bars are still effective as a source of mounting parts that require little rigidity over longer distances. Use-cases that require stronger connections, such as bracing important subsystems on a robot, should be left to stronger components such as or .
Flat Bars can be found at .
Parts that make things go.
Similar to the material of metal used, different types of washers can have drastic effects on the performance of a subsystem.
Plastic Washer
Metal Washer
Metal on Metal Contact
Plastic on Plastic Contact
Using plastic washers between two pieces of metal or metal and plastic helps to drastically reduce friction, and provides for a much more smooth rotation. In cases of plastic on plastic contact, metal washers provide the same benefits.
To connect a mobile device, the device must be running the TM Mobile app (Available on iOS and Android) as well as being on the same network as the computer running the TM server. On the mobile device, a pop up will occur giving a code or the option to change settings. By default, the average user does not need to change settings (although it may need to change the Server IP (given by TM computer) if it has been used at a prior competition). To open the Mobile Devices tool on the hosting computer, go to Tools > Mobile Devices. Type the Code displayed on the mobile device, and fill in the inputs as necessary.
The process of scoring a skills run is easy. Begin by queueing a run, and after the match is run, input the score, select the team number, select the run type, and save the run. It will automatically populate into the rankings where scores can later be edited.
This is the main page for scoring each match (outside of TM Mobile). It is auto populated with scores submitted on the TM Mobile App but must be confirmed here. It varies based on the game but the main functions are the same. The 4 main functions are Save Scores, Reset Scores, Unscore Match, View Score History. They are all self explanatory and will vary the indicator circle next to the match.
Start by selecting a match to score on the left screen, and the middle screen will open. This is similar to the desktop version but can be used for live scoring. The bottom 3 buttons are used to delete the score, refresh the score (if 2+ devices are being used) and to save the score.
Skills matches are scored similarly to the desktop version as well, with a team selection similar to the left screen, and runs saved with scores on the right screen. Teams normally run roughly 3 of each type of skills run however TM will not limit the total number, only notify that the team has run the allotted number.
Gear ratios are one of the most common design decisions that a team must master in order to optimize mechanical advantage in their designs.
A Gear Ratio is defined as the ratio of the rotational speeds of the first and final gears in a train of gears or of any two meshing gears. Essentially, the ratio of the input speed to the output speed of a geared set of shafts. These can be decided to choose a ratio of Speed (large gear driving small gear) or (small gear driving large gear).
Gear ratios are often simplified fractions of the number of teeth on each gear. This is because (at least in Vex) gears have a proportional number of teeth to their diameter which defines the difference in output speed. From the above image, there is a 12 tooth gear, driving a 36 tooth gear which would constitute a 3:1 ratio.
The benefit of gear ratios is the ability to choose speed vs torque in a system. These have an inverse relationship however where a faster output will have lower torque. With the above example, the output shaft has 3x the torque, but also 1/3 the speed.
Torque, also known as moment of force, is a measure of the rotational force applied to an object. It is defined as the product of the force applied to an object and the distance from the object's axis of rotation to the point where the force is applied. Torque is a vector quantity, meaning it has both magnitude and direction.
Torque is often represented by the symbol "τ" (tau) and is calculated by the following equation
where:
τ (tau) is the torque, measured in newton meters (N·m)
Important components for main structural foundations.
The most commonly used type of metal in VEX, C-Channels provide a stable, secure grounding for a majority of subsystems that can be used. The “C” shape contains two corners, which give the C-Channel a strong, sturdy form, making it ideal for structural use and bracing. There are three variations of C-Channel, in terms of their width:
This variety is the most used of the three, as the relatively small form factor makes it ideal for conserving space and weight.
Ensure smooth, frictionless motion in moving parts.
The most frequently used type of bearing among competition teams, Bearing Flats are most often used on joints to ensure the axle spins smoothly without jamming against a flat face.
Comprised of three unthreaded bores along a plastic face, Bearing Flats are most commonly secured to or other through the outer two bores, so as to distribute pressure on the bearing evenly across both sides. With standard VEX axles and fitting perfectly through the center bore, this reduces friction in the axle by providing a smooth, consistent inner surface for free rotation.
Tips on building mechanisms that extend outside of the robot's starting size.
A lot of times a robot will need to have a mechanism that "flips out", or expands outside of the 18 inch box at the start of the match. There are a few different ways to do this.
A lot of teams will make flip out mechanisms that are triggered by the robot's lift going up - it's fairly easy to hold something in place that moves horizontally with a lift, since the lift is constrained horizontally.
Starstruck was a game that required a flip-out mech for the popular claw design. Many flip out mechanisms were triggered by the claws opening. Similar use of the intake to trigger a flip out is good for other games too.
One example of several flip-out mechanisms being utilized on one robot was . Most notably, its claw was held behind its lift tower until the lift was raised.
Another successful flip-out mechanism was the . It utilized a standoff to hold in the intakes until the lift was raised. Then, the intakes flipped out and locked with another standoff.
This video does a great job show casing some of the best practices when building a drivetrain.
Bearing Blocks
When installed, the bearing flats are mounted directly onto the VEX V5 structure and provide a stable and secure platform for the shaft to rotate. The shaft is inserted through the center of the bearing flats and is held in place by the flats, which prevent the shaft from shifting or moving out of position. They are used to drastically reduce friction when shafts and screws are used.
Stand Offs
This is a Work In Progress. We would love feedback & assistance with this from teams with experience.
Email: [email protected]
3D printing is one of the most common advanced manufacturing technique that is used in VexU allowing teams to make complex parts to suit use cases. This technology allows for rapid prototyping, giving competitors the flexibility to iterate on designs quickly and affordably. Not only does this enhance the capability to fine-tune robots for optimal performance, but it also allows for low cost manufacturing.
Raspberry Pis can be used to run displays around competitions as well as hosting match controllers at a field location instead of running wires from a central computer to the field. To do this, a raspberry pi must be running TM which can be downloaded for the pi . TM must be bootable from the pi which can be done using Raspberry Pi's boot loading software found .
To connect a Raspberry Pi, connect it to the network that the competition is hosted on, connect it to power, and connect it to a display. From there, open the Pi manager in TM under Displays -> Configure Remote Displays (Raspberry Pis).
When adding a display, a prompt for the IP address shown on the Pi will pop up and needs to be filled with the information on the display (as shown below). It is then possible to change Dispay Name, add it to a specific Field / Field Set
Audience Displays (Left -> Right)
Intro - Displays queued match's teams and rank
In-Match - Displays match time remaining and alliances
This tool is fairly self explanatory. It opens when a match is queued and is used to control matches as well as the audience display. Match on Field displays the match to be played. Saved Match shows the most recently saved match (This is what will be displayed when Saved Match Results). Match Timer shows time remaining in autonomous and driver control. Audience Display allows selection for field screen display. The bottom allows for selection of playing sounds, the autonomous winner, the field the match is played on, and the status of the field.
To control a match, select Field Set Control -> Desired Field Set which will open the below dialogue box.
The first things to notice are the Match On Field (with option to Queue Next Match), and Match Timer. The main inputs in this display are Field (auto populated based on schedule), Audience Display (Automatically Intro when a match is queued, and swithces to In-Match when the match is started), Autonomous Winner
Metal on Plastic Contact
-
F is the force applied to the object, measured in newtons (N)d is the distance from the axis of rotation to the point where the force is applied, measured in meters (m)
Torque is an important concept in mechanics, as it is used to measure the ability of an object to rotate around an axis. It is a fundamental principle in the operation of machines, such as motors, gears, and levers, which use torque to transmit power and motion.
In robotics, the most common way that torque is important is anything relating to motors. In a drive train, torque is needed to accelerate quickly, hold a top speed, and be able to push opponents on the field. In a lift, more torque allows the ability to lift heavier loads, lift items faster, and maintain speeds during lifting. For a flywheel, torque allows for higher speed, less loss of speed between shots, and easier tuning of speeds.
In summary, torque is a measure of rotational force that is essential in the design and operation of machines and structures. It is used to calculate the ability of an object to rotate, transmit power, and withstand external forces.
BLRS (Purdue SIGBots)
Example: "Pooper" being used to describe ball extraction mechanisms.
If a term is appropriate. widely used, and you'd like to use it in your article, please clearly define it as a substitute for the professional/exact term you are referring to.
Always feel free to ask in your pull request if a term is suitable or not.
BLRS (Purdue SIGBots)
Apply several light coats with time to dry between. Use at minimum 3 coats while avoiding heavy coats that would fill holes in metal or distort dimensions.
Use high quality, trusted spray paint designed for metal. The paint will chip as a result of use and match play. It is better to put in effort up front to assure the metal lasts longer.
A final clear coat is recommended
Anodizing metal is not an easy or cheap process but does lead to a better result than painting which is why it is chosen by some teams. Most schools do not have the ability to anodize in house so some commonly used vendors have been compiled.
More options (not documented by past teams)
BLRS (Purdue SIGBots)
BLRS (Purdue SIGBots)

Saved Match Results - Displays score of recently saved match
Pit Displays (Left -> Right, Top -> Bottom)
Rankings - Displays qualification rankings
Logo - Displays slide show of event sponsors
Alliance Selection - Displays alliances and available teams
Elimination Bracket - Displays bracket with matches to be played between alliances
Skills Rankings - Displays skills challenge rankings (based on score and tie breakers)
Schedule - Displays match schedule of matches to be played
Inspection - Displays inspection status of each team
Upcoming Matches - Displays next three matches to be played


Start MatchEnd EarlyReset TimerThe other options will allow you to give and display a Time-out for a team and toggle whether the computer running the TM server will play Sound Effects.







Tournament Manager is the program made by the REC Foundation for hosting competitions. It is used to simply many of the tasks that come with running a Vex Robotics Tournament at all scales and levels. This article will follow the format of the user guide which is linked at the bottom of the article.
In VRC, a match is played between two alliances, of two teams each, while in VexU there are only 2 teams. At these events, there are 3 types of matches; Practice (optional), Qualification, and Elimination matches. Practice matches have no effect on a team's ranking and are more common at large events to help teams get situated. Qualification matches are used to determine event ranking, where alliances are randomly determined and rankings are determined as written in the game manual. Following all qualification matches, and alliance selection, an elimination bracket will be generated, and matches will be played in a single elimination style.
Tournament Manager supports the use of 1 or more fields where any more than one field at a competition should be added to a field set. A competition can have multiple field sets consisting of several fields each however in each field set, only one match timer can be run at a time. This feature is so that a field set can be used in a round-robin fashion. It is up to the Event Partner's discretion to decide the best arrangement of fields and field sets.
As Tournament Manager is used to run the event, it is also used to share information with teams, and spectators. Tournament Manager has 3 display types. Audience Displays give information to spectators including the match timer, match score results, alliance selection, and rankings information. Pit Displays are used to communicate with teams information like upcoming matches, and ranking. Field Que displays are placed at queuing tables to show what teams are on the field for the upcoming matches.
A balance between the smaller 2-hole and larger 5-hole widths, the 3-hole width c-channels are great for saving space and weight, while giving slightly more room for mounting subsystems to the chassis.
The largest of the three widths, 5 hole width maximizes space for mounting, while taking up considerably more space and weight. Ideal for making your bot heavier, and less susceptible to defense as a result.
A variation of the C-Channel, the U-Channel has an extra hole on the bracket portion of the stock, giving it a more “U” shaped appearance. This stock is great for bracing different towers and other supports, as the “U” shape can envelope the towers, adding additional space for box-bolts, making the towers more secure.
Forming the shape of an “L,” these stocks of metal have either 1 or 2 holes on each end of the L, forming a 1x1 or 2x2 angle bar. Both are mainly used for support, rather than as a main piece of structure.
1x1 angle bars are mainly used for cross bracing, in the form of triangle or X bracing.
2x2 angle bars can be used to brace to parallel towers, while providing additional mounting space in the up or down direction.
BLRS (Purdue SIGBots)
While not quite as commonly used as Bearing Flats, Pillow Block Bearings achieve a similar function for a different use-case.
While standard Bearing Flats are mounted the the main structural component parallel to the axle of the rotation, Pillow Block Bearings are mounted in a perpendicular fashion. For example, Pillow Block Bearings would be mounted on the top of bottom of a c-channel flange, whereas a standard Bearing Flat would be mounted within the two flanges. Using a Pillow Block Bearing can help either raise or lower the main chassis structure from the ground, either raising or lowering overall ground clearance.
Pillow Block Bearings can be found on vexrobotics.com.
Both Bearing Flats and Pillow Block Bearings are available in high-strength varieties. These high-strength bearings have a much larger center bore, in order to accommodate high-strength axles.
The high-strength Bearing Flats and Pillow Block Bearings do not differ in overall functionality from their standard variants, the only difference is their ability to accommodate a larger axle. These parts can be useful for high-stress environments when designing a robot, such as in high-torque gear ratios.
High-Strength Varieties of Bearing Flats and Pillow Block Bearings can be found on vexrobotics.com.
Ball Bearings are an incredibly versatile option for ensuring low-friction under stress in moving parts.
While taking up more space than a standard Bearing Flat, Ball Bearings do offer unique advantages, such as consistently low friction under heavy load. Because of this, Ball Bearings are incredibly useful for high-speed mechanisms such as Flywheels, where having consistent rotation and low friction are essential.
Ball Bearings can be found on vexrobotics.com.

This mechanism was not a "flip-out" mechanism in the conventional way, but Antichamber's Modular Cone Launcher was certainly interesting. In Vex In the Zone, several teams utilized their preload by launching it across the field to block another teams autonomous function. This was one particular mechanism for doing so.
2775J (Jackson Area Robotics)
C-Channels
C-channels come in various lengths and widths that can be easily cut and modified to suit the specific needs of the robot's design. They can be used to create a variety of structures, and act as the basic building block for drivetrains.
One of the main advantages of using C-channels in the design of a VEX drive base is their ability to provide additional support and stability to the structure. The C-channel's U-shape allows it to distribute force evenly across its length, helping to prevent any bending or warping of the metal plates.
Perimeters are the outermost layers of a 3D printed object, providing the shape and are crucial for the object's strength. Increasing the number of perimeters enhances the part's durability and impact resistance.
A minimum of 3 perimeters is recommended for any piece that will be under continuous strain or experience impact.
Infill refers to the internal structure that occupies the space inside a 3D printed object. It adds strength and rigidity while minimizing material usage and print time. The infill percentage and pattern can be adjusted depending on the application.
20% infill is a safe bet. Gyroid & 3D honeycomb are the most common patterns.
Polylactic Acid (PLA) is by far the most common 3d printing filament due to its ease of use, low printing temperature, and above average durability/strength. PLA is a versatile material that can be used for the majority of parts on a robot from structure, to motion components.
Acrylonitrile Butadiene Styrene (ABS) is one of the strongest and most durable 3d printing filaments, but is more difficult to work with. ABS has a high impact resistance and is well suited for any portion of a robot that will undergo repeated stressing such as gears.
Polyethylene Terephthalate Glycol (PETG) is seen as a middleground between PLA and ABS. PETG is more durable than PLA, but far easier to work with than ABS.
These are based on the experience & practice of the Purdue SIGBots.
Screw THROUGH Holes - 0.175" Diameter
Screw SELF-TAP Holes - 0.160" Diameter
Once configured, a Raspberry Pi display can be controlled like all other displays through
When a Raspberry Pi is turned on, it will display an IP address to be input to the TM dialogue box.

This section covers the difference between various High Strength and Low Strength components in VEX. While the two variations do function as the same part, there are often different use-cases, as well as extra considerations that need to be taken into account.
Outside of screw joints, metal shafts are the main way of transferring energy in VEX, by use of sprockets or gears mounted to the shaft.
Low strength shafts are the much more commonly used variant of shaft. the main reason for this being that low strength shafts fit through standard bearings and metal without any alterations.
This variant of shaft is much more flexible and likely to be bent in high torque situations, and should often be checked and replaced if needed as such.
High strength shafts, while useful, are not used in nearly as many places as low strength shafts. The main reason for this being that high strength shafts do not fit through the standard holes in metal, meaning that larger holes will have to be manually drilled out.
High strength shafts, as the name implies, are much more durable than low strength shafts, being able to be used in much higher torque situations as such. For instance, high strength shafts are ideal for linking both sides of a lift through a common shaft.
As high and low strength sprockets have different size teeth, the different size sprockets cannot be linked to one another, as each requires different size chain.
In the vast majority of cases, high strength sprockets and chain should be used over low strength. The main reason for this being that you want to make chain as unlikely to snap off as possible, and using high strength chain further decreases those odds.
Unlike with sprockets, the teeth on high and low strength gears are the same size, and can therefore be used in conjunction with one another.
Dissimilar to sprockets, there is not so much a clear cut boundary of when to use high and low strength gears. In higher torque situations, using high strength gears is advisable, as the extra thickness reduces the odds of the gear snapping. In lower torque areas, or in places where space is a concern, using low strength gears may be a better option.
Due to the popular use of , it is worthwhile to note that low and high strength gears can be alternated in the gear chain. This is a good balance between the risk of gears snapping in an all low strength gear drive and the bulkiness of an all high strength gear drive.
(Purdue SIGBots)
(Yokai Robotics)
The center of mass (COM) or center of gravity (COG) of a robot is the mean location of all the mass of a robot.
Model the robot in CAD, and use a "measure"-type tool.]
Lift the robot by the chassis using 2 fingers. When the robot balances on your fingers, the XY location of the COM will lie in the line formed by your 2 fingers.
the robot, and observe how the robot tilts to settle.
When a robot brakes, the friction between the wheels and the floor rapidly decelerates the robot (velocity is in the opposite direction of acceleration in this case). This creates a torque around the center of mass of the robot, jerking the back of the robot up. In many cases, the rear wheels lose grip with floor as well.
To mitigate jerking ...
lower the height of the COM off the ground
use lighter materials in the upper sections of the robot (ex. 1x1 L channels on arms, plastic screws / nuts)
use heavier materials in the lower sections of the robot
decrease the max acceleration available to the driver
The of the robot is less predictable if the COM (in the horizontal plane) is far from the midpoint of all the wheels. Keeping the COM centered side-to-side and front-to-back ensures more stable and predictable turning.
The end effector used during a hang is typically implemented with a joint. If the horizontal COM is offset from the point where the robot hangs, the robot will tilt until the COM aligns directly beneath the hanging point.
To control the position of the COM in the XY plane ...
place towers optimally after building the chassis
add/remove weight selectively around the robot
We are aware that these links do not work anymore and we are currently working on a more future proof solution for fixing these year to year. Currently, Worlds 2024 links still work. Stay tuned!
If you have any proposed solutions for this other than replacing the links when they break, please do!
Opening Ceremonies
Research Division (Day 1) (Day 2)
Opportunity Division (Day 1) (Day 2)
Closing Ceremonies & Finals
Opening Ceremonies
Innovate Division
Spirit Division
Closing Ceremonies & Finals
Opening Ceremonies
Math Division
Closing Ceremonies & Finals
In materials science, stress refers to the internal forces that exist within a material as a result of external loads or forces acting on it. Stress in metals can be caused by a variety of factors, including temperature changes, mechanical loads, and corrosion.
There are five types of stress that can occur in metals: shear stress, bending stress, torsion stress, tensile stress, and compressive stress. In Vex robotics, the most common types are Bending, Torsion, and Compression/Tension (opposites).
The strength of a metal is determined by its ability to withstand stress without failing. When a metal is subjected to stress, it will either deform elastically (temporarily) or plastically (permanently). If the stress is high enough, the metal will eventually break, which is known as yielding or failure.
Stress can also affect the physical and mechanical properties of metals, such as their ductility, malleability, and toughness. For example, a metal that is subjected to high tensile stress may become more brittle and less able to withstand further stress.
Managing stress in metals is important in order to ensure their structural integrity and prevent failure. This can be done through various methods, such as using stress-relieving techniques, applying appropriate protective coatings, and designing structures to distribute stress evenly. In Vex, stress can be managed by assuring that loads are properly distributed and pieces are properly braced.
Bending is the most common type of stress in the robotics design process. Bending comes from a force being applied perpendicular to the length of an object. Commonly, a piece of metal that is used in a lift will have forces that cause bending.
Torsion is very common in underdeveloped robots. Torsion is caused by force applied tangent to an object's axis, commonly called twisting. Oftentimes, this is seen along long pieces of metal that might be sparsely supported or an axle in high torque situations with little support.
These two are opposite forces where a force is being applied through an axis of an object either pushing (compression) or pulling (tension). In robotics, this is often times seen at connections between pieces through screws, standoffs, or spacers that become inconsistent over time.
(Purdue SIGBots)
Hardware used to attach parts to each other.
While being a seemingly insignificant factor, choice in metal material can have a drastic impact on a robot's performance. There are two types of metal used in VEX products:
Due to its lighter weight, aluminum should be used in subsystems that need to be kept as light as possible, such as lifts and game piece manipulators.
Steel is commonly used in areas where weight is less of a concern, or when a subsystem needs to be made heavier. In the event of a drive ratio favoring torque, a robot can be made heavier to help prevent being pushed by other robots.
As a general rule, however, aluminum should be used in the vast majority of places. Having a heavier robot, unless designed to be so, can be detrimental, and using aluminum instead of steel helps to drastically reduce the weight of a robot or subsystem.
A team, first and foremost, is successful due to the members that contribute to its success. The first step towards creating a VRC team should be generating interest towards creating or joining a VRC team. Regardless of organization or team size, gathering team members is a very important step.
Club fairs are great opportunities to recruit new members, as the presence of so many different organizations in one place will draw the attention of students from all across campus. Different universities have different ways of doing things, but many will have a large club fair at the beginning of each fall and spring term. Creating a poster and sitting at a table for a few hours may seem silly and pointless, but it's likely to create more interest in the team, especially if whoever is at the table is knowledgeable about VEX and is willing to answer any questions that potential recruits might have.
An important part of gaining interest is to advertise; no one can join a team they don’t know exists. Putting up fliers around campus is always a good way to go, but creating a website, social media, and/or a Discord server can also help. In these advertisements, it’s a good idea to include things such as contact information, server or group chat links, and the time and location of any planned callout meetings. That said, if any contact information is included, it is important to be prepared to respond to questions or comments that may be sent. Lack of communication is a good way to not gain interest for a team.
Robots are pretty cool, so showcasing a robot at an event is always a good way to attract attention, especially in a place where people are likely to walk by. If the team is going to a club fair anyway, bringing a bot to showcase (especially if it works) is a good tool to grab people’s interest. Every table around campus and at fairs will have a tri-fold poster and some fliers, but very few - if any - will have an actual, functional robot. Having a robot not only makes it clear what the team does, but it shows that the team, or at least someone on it, already has some experience with VEX.
(Purdue SIGBots)
Commercial Off The Shelf - COTS
This has been used in sets of tracker wheels for odometry. There is some changes to the cable that is needed to connect it to the V5 brain through the 3-wire ADI ports.
This has been used in a set of tracker wheels for odometry. It used M3 screws to attach.
Holonomic drives have become a popular choice for VEX Robotics teams due to their enhanced maneuverability and flexibility in movement. These drives allow for precise and agile movement in all directions, providing a distinct advantage in VEX Robotics competitions where accuracy, and agility are crucial. Holonomic drives in VEX Robotics can be further categorized into mecanum drives and omni drives, each with its own unique strengths and limitations. As the demand for advanced robotics technology increases in VEX Robotics competitions, holonomic drives are becoming increasingly popular among teams seeking to gain a competitive edge.
The X-Drive is a bit more complex to build than either the Tank or Mecanum Drives, but it allows for greater maneuverability than the Mecanum Drive.
The X-Drive is the most maneuverable and efficient Vex holonomic drivetrain and, unlike the Mecanum Drive, its forward speed is equal to its sideways speed. However, the wheel assemblies take up quite a bit of room on a robot, leaving less space for mechanisms.
One interesting thing to note about the X-Drive is its speed compared to a tank drive. Given a tank drive and an X-Drive with the same wheel size and motor cartridges, the X-Drive has a higher maximum speed. The math behind this is shown in .
This is a which uses metal attached at an angle rather than 45 degree angle brackets:
It is also a viable option when creating an X-Drive.
NOTE: When building an X-Drive, it is best to position the wheels in a square shape (i.e. the vertical distance between wheel centers is equal to the horizontal distance between wheel centers). Although other configurations will work, arranging the wheels in a square creates the optimal maneuverability and turning.
NOTE: When building an H-Drive, it is crucial that the center wheel contact the field in roughly the same manner as the other four. To accomplish this, the mounting for this wheel can be spaced down slightly, or a tensioning system can be used to pull the center wheel into the ground.
This video highlights performance differences between several drive trains commonly used in VEX:
Smaller metal pieces used to mount structural components.
There are many different varieties of Gusset available to use in the VEX Robotics Competition, which can be broken down into two overall categories: Angle Gussets and Coupler Gussets.
The primary purpose of Angle Gussets is to mount main structural components at an angle to each other, with one notable example being the use of triangle bracing. Metal Angle Gussets are available in a variety of different sizes and angles from , in addition to custom-made gussets being used by many teams for angles unique to individual robots.
While there are a variety of different Angle Gussets available, they are all similar in that their purpose is to mount structural components at various angles and elevations.
Rather than mounting structural components at an angle, Coupler Gussets provide the ability to mount structure concurrent with existing components, continuing existing structures and extending the length of such pieces. Various Coupler Gussets can be found on .
The most popular variety of Coupler Gusset, C-Channel Coupler Gussets have a variety of different uses, with the main intended purpose being to connect two together and extend the total overall length of the metal.
Additionally, one common use for C-Channel Coupler Gussets is to reinforce existing structure. C-Channel Coupler Gussets are a convenient method to achieve , as slotting a C-Channel Coupler Gusset within a location in the structure of a robot can help increase the integrity of the structural component.
Though less popular than other available gussets, Angle Coupler Gussets are still an effective way to connect or reinforce structural components.
Rather than attaching or reinforcing from within the flanges, such as is the case with C-Channel Coupler Gussets, Angle Coupler Gussets mount to components from the outside faces. This makes Angle Gussets an effective way to "patch" weaker areas that are more vulnerable to , but due to the extra space taken up, are generally considered the weaker option compared to C-Channel Coupler Gussets.
Brackets are a relatively uncommon part used in the VEX Robotics Competition, marketed mostly towards containing various gearboxes that can be constructed using VRC-legal gears.
With their relatively large profile and strict purposes, the various different Brackets rarely see much use, in favor of custom components and use of more efficient mounting solutions. Brackets are more commonly used to cut into unique bracing and custom metal components, as they have a relatively large amount of material to work with. All brackets can be found on .
The Mecanum Drive is just as simple to build as the Tank Drive, but has the ability to drive sideways. It uses VEX in order to drive, turn, and strafe.
The Mecanum Drive is compact and simple to construct as compared to other holonomic drives, but it can be difficult to push from the side and its strafing movement is slower than forward driving. The VEX mecanum wheels' limited roller sets (7) can result in a clunky driving experience, which may hinder programming autonomous functions using integrated motor encoders.
The Mecanum Drive was utilized by . Mecanum wheels are especially effective in games like Tower Takeover which involve rows of game elements or aligning with the field perimeter.
Tips on building a good intake, regardless of the game.
Intakes are one of the most common, versatile, and useful mechanisms in VEX Robotics, as they are able to manipulate a wide variety of game objects, while appearing in many different forms. As a general rule, some form of intakes are able to manipulate any smaller regular-shaped game object, such as balls or cubes. This is compared to large irregularly shaped game objects, such as stars from the 2016-2017 game Starstruck.
It's difficult to generalize intake design principles, since the majority of intake designs will be largely dependent on the game objects for the year. There are, however, two general principles that tend to identify the best intakes - side roller intakes, intakes with rollers on each side of a game object, and top down rollers intakes, which consist of horizontal roller intakes that contact the top of a game object.
As a note, the necessary speed of your intake is dependent once again on the game object in question, but generally faster is better. If the game object is able to be easily moved and carry motion on its own, such as a rollable ball, the intake speed will need to be faster than your robots drivetrain speed to consistently and efficiently pick up the game object. If the game object does not carry motion efficiently, such as a cube from Tower Takeover, the intakes do not necessarily need to faster than the drivetrain, and more of a consideration can be giving to the torque of your intakes if necessary.
Primarily used for game objects that are relatively stationary on the field, or in areas where the intake needs to reach into a specific area, side roller intakes consist of separate rollers parallel from each other in order to intake game objects on both sides. Side roller intakes are often used for actions that need some measure of torque, such as de-scoring, while also being useful for picking up balls, cubes, and other assorted game objects.
One difference from top down roller intakes, as elaborated on in the , is the considerably lesser fielding range of side roller intakes. As opposed to a top down roller intake, which can cover a much wider area to field game elements, side roller intakes only have so much fielding range as allowed by the material of the rollers. This is, while not inconsequential, not ideal for rollers of which the only purpose is to field game elements.
Because there are two separate rollers that compose side roller intakes, however, it is much easier to adjust the intakes for compression. Increased compression means a stronger grip on the game objects being manipulated, which can help de-score from tighter spaces or hold a heavier load. This does, however, have the impact of decreasing the fielding range due to the shorter space between rollers. Separating the rollers, by using the same principle, decreases compression and grip while increasing the fielding range.
As opposed to two parallel rollers combining to form one intake subsystem, the top down roller intake features one singular roller parallel to the ground spinning to intake game objects into the robot. Where side rollers have the ability to be used in a more torque based setting, the top down roller should aim to be a very fast spinning mechanism, faster than the speed of the drivetrain in order to efficiently intake game objects.
Unlike side roller intakes, with which the inner distance between rollers has to be roughly equal to the size of the game elements, limiting fielding range, top down roller intakes can span the entire width of a robot, provided the game object has a constant height. Because of this, the game object should be able to be picked up by the intake regardless of where it contacts the roller. This increased fielding distance is ideal for situations where picking up game objects quickly, without a glaring need for accurate fielding.
Although compression can be altered, by changing the material of the roller and the distance between the roller and the ground, this intake should not be used in high torque or high compression situations. While the level of control over the compression in a top down roller intake is ideal for creating a fast, low torque intake, it is not great enough to prevent jamming a game object between the ground and the roller. This is because there are less moving rollers contacting the game elements than in side roller intakes, which are ideal for the task.
(Purdue SIGBots)
(Yokai Robotics)
The performance of any drivetrain is based not only on the type selected, but also on the quality with which it is designed and built. These Vex Forum threads on Designing a Quality Drive and Designing Another Quality Drive are great resources for newer teams interested in maximizing their drive's performance.
Planning: Set constraints for the drivetrain to best accomplish the tasks in the game (i.e. "The width must be less than 13 inches." or "There must be at least 6 inches of room on the front of the drive to attach a mechanism). By setting these constraints before designing, the processes to follow will be much easier to accomplish.
Designing: CAD tools such as are especially helpful when designing a drivetrain, as they allow the visualization of the drive in its final form. However, a pen and some graph paper is always acceptable alternative. Whatever the method, fully designing the drivetrain before beginning the build is very beneficial. Making sure to account for all spacing.
Robustness: Making sure that the drivetrain follows the mechanics listed in the article allows for a sturdy start to the robot. Ensure that your base will withstand competition as well as other internal loads. Robustness includes both a lack of wear and bending over time, as well as excessive wear to each individual component (wheels, motors, bearings, etc.).
The design metrics correspond the the drivetrain diagram found .
In conjunction with your chosen strategy, design metrics can be used to inform design parameters that satisfy your design criteria. Some example design parameters for the diagram found include
max speed (61.26 in/s)
base stability (proportional to "Distance between End Shafts")
minimum robot size (14.25 in)
To export parts from OnShape, right click on the desired part, and select 'Export'. To export the entire assembly, click the 'Export Tab' button from the bottom toolbar.
This part was originally designed in 4 parts for a chassis, but then began being used for tracker wheels. There is an updated tracker wheel version with a specific insert below.
These were designed to use the with a set of additional 3D printed brackets to mount the AMT-102v encoder & house everything together. This also uses .
This is the Alliance Selection Page. Available Teams shows all teams ranked that are available to join an alliance. If a team is ineligible, the team is shown as a light grey. The Current Alliances shows the seeded alliances with Captain on the left, and Pick 1 on the right. The alliance captain currently choosing a partner is highlighted in Yellow. When a team makes their selection, select the team on the left, and click add team.
Vex drivetrains are assemblies, generally made of wheels, used to traverse the VRC field. Each drivetrain has its own set of advantages and disadvantages.
Team Checkin is used when teams arrive at an event to mark them as present. A volunteer should check in a team and give them any information needed for the event as well as checking that all paperwork that is needed has been received.
Inspection is used when checking a team's robot for legality. This tool does not show all criteria for a team to pass inspection, which is found . A team must pass inspection to be added to the schedule. On Pit displays, teams that are checked in show up as grey, teams that are partially inspected are shown as yellow, and teams that have passed inspection are shown as green.
Announcements are used to show text at the bottom of pit displays. Once published they are shown until the end time that is set when the message is published. Multiple messages can be shown at the same time.
Mobile Devices is a terminal to setup devices on the same network that are running the app. More information can be found here with a full tutorial on how to pair different devices.
This page is under development. We will continue to update information & resources. Additionally, we are testing features with our editor here.
The six bar lift, the four bar's big brother.
The six bar lift is a derivative of the . It utilizes the same geometry of four parallel bars, but in two stages. This split into two stages allows the lift to maintain a lower profile on the robot and condense into a smaller space, allowing for a larger lift to fit within the build limits.
It is typically recommended that only the top bar on the static end be driven by the motors, as there will be increased friction on the bottom arm as compared to the top. This can be alleviated by utilizing a PID control on the arm to ensure that one motor does not provide more force than the other on a given side, stressing the lift components and motors. As with every lift, using is highly encouraged to reduce friction, decrease slop, and increase strength.
When Tournament Manager is opened, 3 options are presented: Create a new tournament, Open an existing tournament, and Connect to a remote server. After the new tournament is created and a name is set up, the server will be started. It is best to save files in an organized and easy-to-access location with clear and relevant names.
On MacOS, if TM says that Port is in use, turn off AirPlay Reciever in System Preferences under Sharing
A successful robotics club is an investment that will teach members various important skills in engineering, as well as in many other fields. In addition to teams learning from external resources, being able to learn from other teams and members within the organization is a system that can help your organization successfully teach new members through generations of teams.
Not only do engineering notebooks provide documentation of your robot and for judges at competitions, they also serve as knowledge bases for future teams in your organization. Well-thought-out and thorough notebooks can serve as a database for building techniques, game strategies, and programming solutions for other teams in your organization long after you've graduated. On top of the content within the notebook, the notebook itself can act as an example of how to layout and format a notebook, to continue the cycle.
When founding a VexU team, it is important to setup processes and procedures that will be followed each year in order to develop stability within the club.
Bylaws are a written set of rules & processes that are followed by an organization in order to clarify any questions about how an organization works. This may or may not be required by the university that a team is a part of, but is nonetheless a good practice to set up expectations within a club.
There are two key electronics sold by Vex to support field control and competitions:
The Match Controller is used to interface between a computer running Tournament Manager and the competition field. One is needed for each field and should be placed alongside the field. The Driver Interface is used to connect teams to the field setup. The teams connect their V5 controllers to the VEXnet port. The 2 match controllers at each field (one for each alliance) are connected to the Match Controller through CAT5 cables.
Above is an example field setup for a small competition. It is physically very straight forward when at a small scale. The lines above represent the only cable that are required to run the match. This however does not show any displays for the competitors and audience, as well as other fields including skills fields. Much of this requires a network to be setup instead of running display cables directly from the main computer.
Laser cutting is an ideal manufacturing technique in VexU for any flat design such as gears, brackets, and more. The technique is fast, and versatile across materials allowing for quick iterations and final products that suit the designers' needs.
The process begins by designing a digital program in a CAD/CAM system that directs the laser cutter. This design file, typically a DXF or DWG file, outlines the desired shapes and dimensions of the parts to. The laser cutter, guided by the CNC system, then uses a concentrated beam of light to melt, burn, or vaporize the material along the programmed path.
There are many factors that come into play when deciding how many teams to create, including, but not limited to:
One important thing to consider is the number of participants that will be participating on a VEX Robotics team. While team sizes can range from one to upwards of ten members, having too many or too few members per team can make progress inefficient with regards to creating a functional robot. More information on an effective team size can be found in the Member Allocation and Management segment of this section.
When deciding whether or not to create additional teams within your organization, it is important to determine whether or not an additional team will factor into the budget. When starting a new team, or multiple teams at once, you are effectively doubling your startup costs with additional parts and logistical fees, among other things, that will have to be purchased. For more information on organizing a budget for your teams, please see the Financial Breakdown segment of this section.
In addition to having the manpower and budget to create an additional team, the logistics of competing with more than one team must be taken into account as well. Hosting teams will require some place for these teams to work, whether this is just a desk, or a full field setup. While a full field can be shared by numerous teams, it is beneficial to take spatial concerns into account when deciding how many teams to create. In addition, transportation to competitions must be factored in as well, whether this is a school-sponsored bus, or independent transportation on behalf of the team members.
In addition to the above, organizing your members into effective teams is essential. For more information on Member Allocation and Management, please see here.
Registering a team, in an VEX Robotics competition, can be done on RobotEvents. When registering teams through RobotEvents, you will be asked to choose a team number, among other important information, as well as letters for each team. Your team number will be consistent across every team you register in a given competition, and the letter will be the differing indicator for each team (94999E and 94999X, or BLRS and BLRS2).
BLRS (Purdue SIGBots)
The solenoids which control the pistons are small, but make sure that you leave ample space around the connectors for tubing so the connectors fit well.
Do not design tight corners for Tubing.
There is a high risk that your connections will be ripped out if you run the tubing around sharp corners, tubing and solenoids can both get damaged. There is also a chance that the tubes could be kinked and stop or limit airflow
Consider weight distribution of Reservoirs
The reservoirs may be aluminum but are still fairly large and heavy. It is beneficial to keep these low and centered on your robot. It is also important to keep room for these components as they do take up a lot of space.
During robot construction, there are not many helpful tips, but these should always be followed.
Always overuse Tubing.
There is never a downside to using too much pneumatic tubing. Using too little can lead to connections being damaged and tubes being stretched. Having slack in tubing lines is important to ensure consistent operation.
Know your pivot points.
The majority of applications for pneumatics have linear motion being converted to some rotational motion. Make sure to solidify whichever point you have that pivots.
Distribute the Loads.
Be certain to even out the force on each side of the pneumatic cylinder. If only one side is loaded, there is a high chance the pneumatics will not function as intended.
Never work on pressurized pneumatics.
For safety, never work on pneumatics that has pressure, use the regulator and flow switch to depressurize or isolate workable components before doing any maintenance.
Use Teflon tape.
Teflon tape is used to seal anywhere that there is a thread in the system. For all valves, Teflon tape helps to reduce the risk of leaks. If your system has leaks, the best place to look is at valves.
For ideal operation, follow these tips.
Optimize the airflow into Tanks.
The pneumatics kits come with a regulator. Experiment with the amount of airflow through the regulator so that your pneumatics have just enough force to complete your intended action. This will mean the cylinders can actuate more times per full pressurization.
Pressurize tanks at every opportunity.
The legal pressure is set at 100psi, which is quite low for most applications. Due to this, the constant re-pressurization of tanks must be a priority.
Bylaws should include any status that a person can hold in a club (recruit, member, officer, etc.) as well as the expectations & responsibilities that come with that status. They should also outline processes such as onboarding, disciplinary action, and officer elections. It is important that bylaws are agreed upon and specific so that there are less disagreements.
An Officer Board is an elected group of students to hold key roles in a club/team. This board should include (at minimum) a President, Vice President, and a Treasurer while additional officers can be added as seen fit. It is up to an organization to find specific requirements, expectations, and election processes to follow.
This article is written primarily based on the experience of The Purdue SIGBots. As an organization with 14 years of experience competing in VexU, we have made many mistakes and want to share what we have learned, but this is not the End-All / Be-All solution.
There are 2 structures that need to be setup for a VexU team to be successful. Firstly is a communication platform. This is where members can discuss plans for a season, potential meeting times, and the status of tasks. Second is an organization platform where progress is documented, and overarching club organization can take place. These can be one shared platform, but it is often times better to find 2+ platforms that better suit each need.
This should be a highly organized place for documenting what is most important to the organization as a whole, and likely where a team's Engineering Notebook can be written & stored. The Purdue SIGBots has had success with using a combination of Google Drive & Notion.
Notion is a great way to organize information in series of databases, and nested pages. This allows for an organization to host living documents that need to be both edited & read (e.g. club bylaws & weekly meeting notes) alongside many other features that help with team organization, onboarding, and sharing resources.
Google Drive is a more general purpose file storage system. Google Drive has the capability to do what Notion does, but also allows for large file storage (e.g. shared CAD libraries, etc.) and a connection to the Google Work Suite with Google Docs, Sheets, & Slides for general purpose use.
This should be used for daily communication for members of the team. It is a best practice to keep this as open as possible as to not limit communication between members. Never create communication pathways that are needlessly restricted from certain members as this can quickly lead to a toxic working environment.
Discord is a common communication platform used in the Vex community. The benefits of Discord is its cross platform capabilities as well as how is can split one organization's server into many categories & channels for specific topics. Discord also allows for fast sharing of files and the ability to do audio/video calls within a server. Discord is also free.
Slack & Microsoft Teams both act similar to Discord but are used more widely in professional atmospheres. They both offer several plans for specific needs, but a university might also provide licenses for students.
The process that is used to track resources will vary based on the scale and preference of a club however it is vital to reduce waste, harm, and expenses.
Firstly, ensure that all equipment that is owned by the club has a place. The easiest way to keep a space clean, is to give everything a place that it should be stored and used. Small bins & tape for labels is a very inexpensive way to help organize a space.
After organizing, catalog all equipment. This doesn't have to be a count of every screw, but a list of all tools & equipment paired with a rough estimate of building materials goes a long way. This will ensure that when packing for competitions, equipment can be tracked and over a season, nothing is lost or stollen.
When ordering more parts & tools, it is a good practice to share an order sheet with the entire club so that expenses can be tracked easily & everyone can receive the parts that they need.
When dealing with large groups, it is important to keep track of all members in an organized way. It is a good practice to share a form with the team to document key information about them. From an organizational standpoint, having a name attached to a phone number, email, and similar information is helpful for emergencies. Having information on members' age, major, and experience is very helpful when dealing with the university as well has when talking to potential sponsors.
SAFETY FIRST! Lasers are dangerous tools that can cause serious harm if not used properly. Make sure that proper PPE is used, there is supervision, and the machine is setup with proper ventilation.
Laser Cutting is very versatile, but many people lack experience with the technique and therefore fall into common traps. Firstly, avoid sharp corners (both internal & external) that would likely be rounded over when being cut. Additionally, plan joining features early for each part so they can be cut properly & reduce assembly time.
Until tolerances are refined, and experience is had, make sure to test parts & features on less expensive, easier to obtain/cut materials as to not waste time and money.
Polycarbonate - This material is strong, impact-resistant, and readily accessible in most areas. One concern with Polycarbonate is its flexibility, especially since most laser cutting machines will only cut <0.25" thick Polycarbonate.
Delrin - This material has a high stiffness, low friction, good dimensional stability and is great for applications such as gears because of this. Delrin is more expensive than some more common plastics, but is still readily available on sites like Amazon.
Aluminum - Despite needing a powerful laser to accomplish, Aluminum can be cut on a laser cutting machine making it perfect for complex structures & strong braces. Aluminum itself is lightweight, strong, and corrosion-resistant making it a great material for use in competitive robotics.
Heavier Material
Lighter Material
More Rigid and Durable
Easier to Bend and Break
Appears Darker and more Reflective
Appears Lighter and flat
Efficiency: Ensure that each wheel assembly (and gear or chain assembly if applicable) has as little friction as possible. A good rule of thumb is that a mechanism is "good enough" if it can spin freely for more than 5 revolutions. Of course, you are the judge of whether or not your mechanisms cause enough friction to affect robot operation. Some common causes of unwanted friction include misalignment (components are not in line, causing rotation to be more difficult) and rubbing (two components are moving against each other). In the latter case, they could be spaced apart, or the material can be changed (metal-metal contact --> nylon-metal contact).
Motor RPM
600
Wheel Diameter
3.25 in
Gear Ratio
5:3
Distance between End Shafts
11 in
Distance between Wheel Ends
14.25 in
The best In-House resource for a club's longevity is passionate students who will share everything they learned with new students. This is often fostered by working together across sister teams. Sharing design ideas throughout a season, asking for help, and giving help, as well as game strategies and more.
Another good way to develop resources is a shared drive folder (on a preferred platform). Teams take hundreds of photos and videos throughout a season. Compiling these will allow for new students to get a boot camp of what the process will look like. This is a great spot as well to compile build techniques or interesting mechanisms that have been developed in the club. Haverford (169) has employed this in the past where teams will compile their photos towards the end of the season to the drive and will share everything they have learned.
Code libraries are very helpful in organizations to assist in the start-up process for a new team, or new students. Commonly, this is done on Github. Compile all code that is created throughout the year, and in past seasons. BLRS has a GitHub here with past seasons of code as well as PID, Odometry, and Pure Pursuit libraries (some of which are private for team use only right now).
Past robot libraries, displays, and notebook libraries are also helpful. Similar to the shared drive mentioned earlier, this is a great way to document designs, mechanisms, and build techniques. The easiest way to teach robotics is to show someone a past robot. If it is possible, displaying some past robots (ones that have done well for example) in the club meeting space helps to show a team close up how robots work. Some teams like SJTU have CAD models of their past robots as well. And notebook libraries can just be a shelf in a meeting space that show past notebooks that people can look through as needed.
At Purdue, the BLRS Wiki is in itself a form of an In-House Resource. Team members are asked to document knowledge that they have gained from VEX. This covers so much from organization creation, to build techniques. For BLRS, it is all published; however, this is not required. Resources like this are a great way to document learnings across an organization.
Mentorship between the more experienced teams in an organization and the less experienced teams is one of the most effective ways to ensure the long-term competitiveness of the club. If all of the knowledge on how to be a successful team rests in a single team in the organization, the organization will struggle when that team graduates. However, even after graduation, there are still plenty of opportunities for graduated members to continue to help their VRC organization. Staying in contact with teams using communication platforms such as group chats and Discord are great ways to continually receive build advice and programming help while alumni aren't able to help in person.
To take mentorship to the next level as a VRC team, working alongside other teams in your organization can help develop multiple competitive teams at the same time. This has many benefits, such as mutual improvement of each team, better drive practice (viable 1v1's and practice matches), and the ability to coordinate alliance selections. Many top-tier organizations have employed this strategy throughout many seasons with great success, such as 169 and 8059.
Another great thing to look into is communication with other teams across regions and the world. The VEX forum for example has thousands of teams communicating daily and is a great place to ask questions and share knowledge. Similarly, YouTube has hundreds of VRC-related videos from reveals to tutorials. Many regions also have Discord servers. Talk to teams in different regions though to find out if there is a local Discord Server. With parent permission, these are a great way to get involved in the VEX community. The largest server is VEX Robotics Competition (formerly VEX Teams of the World AKA VTOW). This is an unofficial discord not affiliated with VEX which has teams from around the world.
BLRS (Purdue SIGBots)












implement motion profiling and other motor control techniques




First, upload your CAD file to Fusion 360, and follow this guide below to retrieve the embedded code to share your CAD.
The code to copy should be located here.
Sign up for CodePen, and paste the code under the "HTML" section. Once the code is in the project, you should see a preview of the CAD. Your project is already public, and what you need to copy now is the URL in your browser tab.
If this wasn't cleaer enough, this is what we mean:
If using the in-browser editor, paste the URL of the CodePen project into the project, and make a press enter to auto-embed.
If using github markdown directly, check this raw file to see how the CAD below was embedded.
If you are making a contribution in another format (Google Docs or PDF), please complete steps 1 and 2 and include the URL on your submission in the appropriate location so we can embed it for you when processing your document.
Note that the CAD takes a bit to load, and the ratio for the viewing window is suboptimal. If others have different solutions please let us know at [email protected].
Clean parts thoroughly with dish soap to remove dirt or oils.
Add roughly 3 parts water along with 1 part dye and 1 part acetone to a stainless-steel bowl. Have enough liquid to cover the desired parts. (Additional water, acetone, and dye will be needed to have more on hand)
Place the bowl on the stove over Medium/Low heat until the mixture reaches 160°F.
Add desired parts to mixture slowly and carefully. Beware of splashing as mixture should be coming to a low boil.
Monitor mixture's temperature and volume. The goal is to keep the mixture between 160°F and 190°F with all parts consistently submerged. Stir occasionally and add more water, acetone, and dye as needed to keep volume consistent. When adding acetone, always pre mix with water.
After 10-15 minutes (when parts are dyed to satisfaction), let bowl cool and rinse parts thoroughly until water runs clear.
The best color to aim for is black. Anything lighter is difficult to produce with green parts especially. Colors such as purple and orange are possible with basic color combinations however will take more practice and tuning to get right.
When working with smaller parts such as nylon spacers, stir more often as the dye tends to settle and parts may come out cloudy or inconsistent.
Dyeing of wheel rollers (omni / mecanum) is possible but tend to wear out over time. Assure that no residue is left behind in testing as damage to field or game elements can be cause for disqualification from a tournament.
If a part is heated too high or for too long, it can alter the physical attributes of the part which would render the part illegal for use in VRC and IQ competition.
Pros
Cons
Relatively easy to build and maintain
If built properly, can reach higher than a lift on its own.
Similar to a four bar, this lift has a relatively easy implementation into adesign.
More torque necessary to lift to full height than a
Front heavy when horizontally extended; more likely to tip forward
Increased potential for friction and slop due to the increased number of joints
Because the lifting length is longer on a six bar than a four bar, more torque is required in order to lift the arm to its full height. The weight and length of the six bar lift also creates additional friction on the joint of the lift and the motors powering it. This can lead to more issues than would be encountered with a four bar lift such as burnt out motors or broken parts. The added length of the lift arm can create a greater tendency for the robot to tip forward when lifting or moving. Heavier loads will increase this chance of tipping. Despite these issues, the six bar lift is a very common lift system as well because it is relatively easy to build and maintain when compared to scissor lifts and reverse six bar lifts. Like the four bar lift, the six bar lift keeps the lifted end at the same angle throughout a lift or decent.
BLRS (Purdue SIGBots)
MTBR (University of Michigan Task Based Robotics)


When playing matches, 2 points are awarded for winning, 1 point is awarded for tieing, and 0 points are awarded for losing a match.
Autonomous Win Points are also awarded in some games where after completing a defined task in the autonomous period, an AWP is awarded to the alliances that succeed in the task.
Average Autonomous Points (AP / Number of Matches played)
The team that wins the autonomous period in each of the qualification matches is awarded 6 APs, a tie results in 3 for each alliance.
Average Strength of Schedule Points (SP / Number of Matches played)
SPs are determined as the score of the losing team in each qualification match. These are awarded to all 4 teams in a match.
Highest Match score
Second highest Match score
Random electronic draw
Rankings are published throughout the event on RobotEvents.com, VexVia, and displays around the competition. After the final matches are played, the final ranking is published and alliance selection is started.
The highest ranked Team at the end of Qualification Matches becomes the first Alliance Captain for the Elimination Bracket
The Alliance Captain invites another Team to join their Alliance
This team can either accept or deny depending on whether or not they see that it is a good fit.
If a team denies an invitation, they are ineligible to be invited to another alliance at the competition. They can however be an alliance captain if they are ranked high enough to enter this process.
If an invitation is denied by a team, the alliance captain can ask another team to join their alliance and the process is repeated.
After an alliance is formed (with 2 teams) the next highest ranking team not in an alliance becomes the alliance captain and this process is repeated.
Above is the layout for a 16 alliance competition. Matches for the Round of 16 are generated after all alliances are formed. For competitions with less than 16 teams, but more than 8, the higher-ranked teams will get a Bye (pass) for the first round of the elimination bracket. There is an alternate bracket for 8 alliance competitions where all blue alliances above are removed and the elimination round starts at Quarterfinals.
Optimal team size for a high school VRC team is 4-6 people. This allows at least 1-2 people working on software and mechanical aspects at a time. This begs the question, why not more?
The issue with team sizes such as 8 as common in larger organizations, is that there tends to be too many people with not enough things to do (too many chefs in the kitchen). This becomes an even larger issue when evaluating a team based on the design award rubric, which directly contributes to the design award and excellent award.
With these sections requiring that teams have "All students answer questions independently", and that "students were assigned to tasks based on their skills and availability", this becomes much harder to explain and show if there simply are not enough tasks at all times for all students to do.
This idea is very much related to the Law of Diminishing Marginal Utility, which describes the addition of each additional unit (team member in this case), continuously having a decreasing usefulness to the team, until that usefulness becomes negative and is detrimental to the team. Click the link embedded above for more information.
Team leads are somewhat of a controversial subject in robotics teams, as they have the potential to cause a large amount of strife within a team. Because of this, we cannot recommend team leads on the team level as team leaders tend to dominate team decisions unless the team lead(s) is the only competent person on the team with experience (which is also subjective at best).
However, if a team does require a lead (such as in the case above), the best way to do leadership is from a bottom-up approach where the team as a whole talks through decisions and the lead is there to drive that conversation, as opposed to a traditional top-down leadership structure where the team lead is the final say in everything and their opinion reigns supreme.
At the end of the day, the engineering design process must be the driving force behind the teamwork, not the leader themselves.
(Definitely easier said than done)
Technical Roles (Mechanics, Programmers, etc.):
Technical roles are relatively self explanatory. The main two being mechanical engineers who are responsible for building the robots, maintenance, and coordinating with the software engineers who are responsible for figuring out where sensors need to be mounted and programming both the drive code and autonomous.
Since the programming and building of a robot may happen at different times, the same group of people may be used for different roles during each phase of the build process. It should also be noted that all members (whether they are on software and mechanical) should be involved on the entire design process.
Some other roles may exist such as electrical engineers, who are there to prevent ESD, maintain wiring, or even mechanical maintenance on the robot. This could be done by members only interested in either programming or building, during the phase where they may not have as many responsibilities.
Support Roles (Notebookers, Drivers, etc.):
Similarly to the electrical role mentioned above, these roles can be done by members with less technical responsibilities or during their downtime. Notebookers are a must have throughout the build process and programming process, and are best done by the ones building and programming at the time. However, if properly explained to others, people who aren't directly programming or building are able to also notebook as well.
Driver roles are somewhat of a controversial topic as well, as different members all may want this role. There is no set in stone solution to figuring out who should drive, but professionalism and the lack of personal emotion with regards to the team's decision process is key to keeping a team dynamic together. The best people to do this are the ones who both have the most amount of down time during the programming phase for the robot, and come and stay for meetings the most since this will give them the maximum amount of time to drive.
Member allocation and management is something that does not have a cookie cutter solution for each situation. It must be adaptable depending on various factors surrounding a team, such as level of experience and number of members among others. The only thing for certain is that establishing a working system for a robotics team that is both flexible and appropriate for the situation as early as possible is key for a team's success.
BLRS (Purdue SIGBots)
Location to connect the tournament to RobotEvents.com where, if the event is listed there, the information can be input from the administration page of the event. Much of the following steps will be automatically completed if the event is connected here.
This is the location to choose the program for the competition.
Alter the presets and selections of the competition ahead. The smaller the event, the simpler the future steps will be. Choosing a Large Event will require a lot of experience and knowledge of running tournaments and using Tournament Manager which will not be covered on this wiki.
Name of the event for the Tournament Manager server and a password for logging other devices into the event server.
Used if the event is part of league play.
Select the game preset to be used for matches and skills challenges (or basic game for scoring freedom).
Either import a team list from Robot Events (or other CSV) or Generate Teams randomly (Will be shown in a CSV to edit)
There are several options to be tweaked here however they should come from reference to the game manual. Select the proper number of alliances for the size of the event (most likely 8, 12, or 16). The 3 other options will be prefilled and should stay the same
This is used to set up fields, and fieldsets. The differences of these are discussed in the Tournament Manager article. Several fieldsets and fields can be set up here as needed.
Here, the skills fields can be designated. They will not have a name as they are not scheduled like fieldsets. There is also an option for Maximum Skills Challenge Attempts however this cannot be changed for official events.
The differences in these are discussed in the Tournament Manager article. Multiple of these can be set up however this page does not control Audience Displays (on fields) or Field Displays (for queuing).
This page will change from event to event. An agenda should be predetermined for the event and be displayed on robot events for teams so this page should reflect that. The biggest thing that is up to the discretion of the event partner is the match cycle time. This will vary based on average team experience, the number of desired matches, and the number of fields and fieldsets that are being used. Most events use 6-8 minute match cycles. These choices should reflect practice matches, and more than one set of qualification matches if lunch or multiple days is needed.
This page is used to generate the match cycle, and then view the statistics of the schedule. This can be used to tweak the previous page's inputs to ensure all teams' good and fair experience.
This will have been previously determined and displayed on Robot Events however the awards to be given at the event can be selected here. Most common awards are shown here to be selected, however custom awards can also be added for special recognition.
This can only be used if the event is connected to Robot Events. It is HIGHLY recommended to publish all information to Robot Events and VexVia as it comes for the benefit of both competitors and spectators. If a fast internet connection is not available at the event for teams and spectators, other forms of communications should be prioritized (more monitors, PA systems, etc.).
Congrats! This is the last page before the event is set up and is a good time to tweak previous decisions although most settings can be changed after the event is finalized.
High forward traction
Slow compared to tank drive
Ability to strafe
Innefficient strafing
Space innefficient
















Clever programmers can take advantage of mecanum wheels to improve maneuverability in the autonomous period.
Mecanum wheels are advanced wheels used widely in the scope of robotics and often in compeitive robotics due to their ability to introduce fully omnidirectional movement onto a drivetrain. These wheels take advantage of angled rollers which restrict their degrees of freedom onto one axis, allowing them to move freely diagonally. When spun in a uniform direction, the mecanum wheel functions as a typical wheel and propels a drivetrain forwards. However, when spun in conflicting directions with the wheel adjacent from it (in terms of a four wheel drivetrain), the robot begins to strafe thanks to its angled rollers.
In VRC, there are only two legal sizes of mecanum wheels: 2 inch and 4 inch. Each size has two variations which are crucial to the functionality of the drivetrain: a left and a right variant. The difference between those two variants is that the rollers angle themselves inherently differently.
The proper placement of these wheels based on their variants is described in the article ""; this placement holds true for any mecanum wheel, regardless of its size.
While these wheels theoretically allow a robot to strafe in all directions, the mecanum wheels manufactured by VEX Robotics are riddled with a number of tradeoffs that can make them difficult to use effectively. However, they can be elegant when paired with the right builder, programmer, and/or driver.
Generally speaking, mecanum wheels inherently suffer from a few tradeoffs that can be mitigated through a smart design, but never eliminated completely. For example, because of inevitable frictional losses from the rollers, a realistic mecanum wheel drivetrain cannot strafe as fast as it can move forward. For a similar reason, mecanum wheels require a lot of torque to power in tandem with each other since they must move in conflicting directions in order to strafe, making it very difficult to strafe with them at any linear velocity above 3.29 m/s (300 RPM on 4 inch wheels). Additionally, these wheels are burdened by any shift in center of gravity, meaning that if the center of gravity is not close enough to the center of the robot, the wheels will simply fail to strafe and will cause the drivetrain to turn instead.
First manufactured as a part of the VEXpro line and then made legal for use in VRC in 2021, the 2 inch mecanum wheels appear to be a compact solution to the complexities of holonomic movement. They measure 1.5 inches (around 38 mm) in width, and of course boast a very small diameter. Unlike most other wheels used on drivetrains, this size of mecanum wheel in particular utilizes a hexagonal bore, meaning it is necessary to use a VersaHex to convert the bore into a square bore.
The functionality of the 2 inch mecanum wheel has been an enigma that competitors have been desperate to understand further. Although mechanically rated to be suitable for a VEXU drivetrain (therefore also making it compatible with a VRC robot), it has been observed that these wheels actually have trouble supporting the weight of the robot. This is because the architecture of the wheel's frame gives a near-zero amount of clearance between the frame and the rubber roller, causing the frame to actually sink into foam tiles if the robot is too heavy. For this reason, it has mostly been limited to usage on intakes. If used on the drivetrain of a moderately heavy robot, the robot will struggle to strafe as the angled rollers will be unable to make sufficient contact with the tiles.
Multiple plausible solutions to the wheel's clearance issue have been proposed, although it is unclear how effective each solution actually is because there has been limited testing of this wheel in drivetrain usage.
The first obvious solution that has been attempted is to shave down the area of the frame near where the pin connects to the roller, thus artificially increasing the clearance between the tile and the wheel's frame. This would allow the wheel to be more "tolerant" of sinking into the tiles under the robot's weight. One potential issue that could arise from this is the chance that shaving down the frame too far may lead to a detrimental decrease in structural integrity near the pins of the roller, which may cause the wheel to disintegrate altogether if used in a high-stress situation.
The second suggested solution is to use eight wheels instead of only four on the drivetrain, thus spreading out the weight of the robot amongst more wheels which would lead each wheel to sink into the foam tiles less. This comes with two major tradeoffs, though: it is expensive to purchase four extra wheels to do this, and it also requires much more space since there is not only more wheels but also the necessity to introduce an additional gear train to ensure each wheel moves in the proper direction.
The final solution is to simply make the robot lighter, but this is incredibly difficult considering that the weight threshold of the 2 inch mecanum wheels appears to be relatively low; through testing done by , it seems to not be possible to have a drivetrain of four 2 inch mecanum wheels that strafes properly if the robot weighs anywhere above 13 pounds, and even going below that still may not ensure optimal performance.
Manufactured since 2011 as a part of the then-named "VEX EDR" line, 4 inch mecanum wheels are a reliable but somewhat bulky option to use in creating a holonomic drivetrain. These wheels measure in at around 2.5 inches in width, and, deceptively, their diameter actually happens to be 4.125 inches, not 4 inches.
Although not afflicted by the same clearance issue as the 2 inch mecanum wheels, the roller profile of the 4 inch wheels cause a couple of issues.
First of all, the rollers are arranged in a dual-sided cantilevered setup, which causes immense amount of friction for the rollers. This limits how quickly the mecanum wheel can strafe, making it such that the strafing speed is somewhere around 80% of the forward speed from frictional losses alone. These frictional losses are of course subtly seen on the 2 inch wheels, although its not clear how close or far they are in magnitude to the 4 inch wheels' losses due to a lack of data.
Second of all, each roller utilizes a conical sort of shape, more specifically that of a cone's frustum. This minimizes the wheel's traction because the wheel covers less surface area, giving it more of a chance to slip because the force of friction is acting on a smaller area. Other, more effective mecanum wheels appear to utilize cylindrical rollers instead.
(Purdue SIGBots)
Mitigate the effects of opposing defense with traction wheels.
Traction wheels, mostly only referred to plainly as "wheels" by VEX, are the simplest wheel type offered in the VEX Robotics Competition, only having one degree of freedom (forward and backward). They are made up of two simple parts: an acetal frame and a tire that fits around said frame, typically made of rubber or a material similar to rubber. They are typically used in the center of drivetrains to restrict unwanted sideways movement (such as from defense).
Although all anti-static wheels perform identically, the original wheels and traction wheels all have very different functionality.
Anti-static wheels have a high amount of traction and, unlike their predecessors, have a uniform width and tire shape. Although they are wider than the original wheels, this is actually an advantage rather than a detriment since the larger tire surface area increases the odds that the wheel will make contact with the field tiles, allowing the tire's traction to have a larger effect on the wheel's overall performance. Additionally, the width for all three sizes only comes out to be 1 inch, a compact wheel in comparison to the various wheels VEX Robotics has manufactured.
Conveniently, the hubs of the wheels come with many mounting holes which allows the user to fasten gears or other relevant motion objects onto the hub.
These wheels have tires with special properties that prevent the accumulation of static, which decrease the odds of damage to electronics due to electrostatic discharge. For this reason, the tire material feels slightly different from the original tires which are made entirely of rubber.
2.75" wheels feature a small hub and a green, filleted tire. Although the traction of the rubber on the wheel's tire is excellent, the fillet of the tire causes massive loss of traction due to there being a very small point where the tire actually contacts the tile. The fillet of the tire can actually be useful in use cases other than a drivetrain, though, such as spinning a roller from a wide angle in the 2022-23 VRC game Spin Up, for example.
3.25" traction wheels have the most unique structure of the original wheel variations, boasting mounting holes on its hub akin to the ones seen on the anti-static wheels and having a unique tire shape which features bumps protruding from its circumference. In its base state, the 3.25" traction wheel has been widely avoided because of its "bumpy" tire shape. Due to the topography of the tire being variable, it loses out on potential traction it could have gained by having the receding parts of the tire contacting the field tiles. However, legally modified 3.25" traction wheels used to be considered viable in Tipping Point before the release of 3.25" anti-static wheels. Using a belt sander, teams such as , making the tire's circumference constant. With this new wheel, teams would use it as a hub for a 3" tire (a flex wheel which has all of its spokes cut out).
4" traction wheels have the unique property of having interchangeable tires, being the only wheel where this is an intended feature. There are two possible tires: the base tire and the high traction tire. The base tire lacks traction almost entirely and takes up a strange pattern of triangle and lines in an attempt to mimic car tire tread. The high traction tire has significantly more traction, but suffers from the same issue as the 2.75" wheel, in which the filleted tire causes the contact area of the tire to be very small.
(Purdue SIGBots)
Wheels that have a multitude of degrees of freedom thanks to their rollers.
Omnidirectional wheels are a commonly used wheel type within the VEX Robotics Competition that make use of many cylindrical rollers to ensure that the wheel itself has more degrees of freedom.
Unlike a typical wheel which only has one degree of freedom in the forward/backwards direction, the omnidirectional wheel has an additional degree of freedom with sideways movement. Some benefits to this additional degree of freedom include being able to make fluid turns and the potential for holonomic drivetrains to be created. However, this behavior also means that a robot utilizing only omnidirectional wheels on its drivetrain is much more prone to defense from adjacent robots. Teams have historically used omnidirectional wheels in tandem with traction wheels at the robot's center of turning in order to mitigate the effects of defense.
There are six variations of the omnidirectional wheel that are legal for use in VRC. The wheels come in three sizes, and also have two functional variants: original or anti-static.
Anti-static wheels were developed in order to try and mitigate the amount of static built up from the wheels rubbing against the field, therefore decreasing the odds of damage to electronics due to electrostatic discharge. These wheels also happen to be thinner than the original wheels for all sizes and have smaller rollers.
In the case of the 4 inch omnidirectional wheel, the anti-static version is genuinely 4.00 inches in diameter as compared to the 4.125 inch diameter of its original counterpart. This makes it compatible geometrically with other wheels, like a 4 inch or a 4 inch traction wheel.
The original 3.25 inch omnidirectional wheels have been less favored by the VRC community because they are the only set of wheels which utilize plastic rollers rather than rubber rollers. This leads to an immense loss of traction, making it less reliable when facing off against defense or in the instance of a platform needing to be climbed, like in Turning Point and especially Tipping Point. However, these wheels do have their advantages. They are the thinnest of the original trio of omnidirectional wheels, coming in at the same width as the anti-static wheels, and it is also possible that the plastic rollers may bring less frictional losses when used on a holonomic drivetrain like an X-drive.
For specifically 2" omnidirectional wheels, follow the instructions found to create 15 and 30 degree clocking positions.
Omnidirectional wheels have been commonplace on VRC drivetrains since their creation. They are especially useful when creating or "Kiwi" (three wheel holonomic) drives because of their ability to expand the amount of degrees of freedom the drivetrain has. When the wheels are arranged diagonally, the robot is still able to move smoothly because as it moves in any direction, the wheel's rollers spin along with the wheel, accounting for the movement in both the sideways and forwards direction.
2.75" omnidirectional wheels can make great tracker wheels for odometry purposes due to their small diameter. In fact, 2.75" omnidirectional wheels used to only be used for odometry, until more recent seasons in which teams have begun to get more creative with their drivetrain gear ratios.
(Purdue SIGBots)
(REX)
Frankly this is just a lot of hot air...
Pneumatics are a system of components that use compressed air to create motion. In most cases, this is linear motion from cylinders (sometimes called pistons) but this motion can be used in many different ways. In your life, think about pumps for athletic balls, nail guns, and shocks on bikes. There are 3 subsystems to pneumatics in Vex. There is Air Storage, Air Control, and Pneumatic Cylinders.
Air Storage is where the pressurized air is held in a robot. For Vex, this is done in aluminum reservoirs. In most seasons, a team can have 2 of these on their robots and they are pressurized to a maximum of 100 psi (Pounds per Square Inch). The 2 main considerations in storage are the volume and the pressure of the air. The volume changes how many times that you can fire the cylinders and the pressure changes how strongly the cylinders fire.
Air Control defines when and how actions are taken with pneumatics such as cylinders. In pneumatics, this is done with either Finger Valves or solenoids. A Finger Valve is a manual 'on and off' switch for cylinders and pneumatics. Solenoids are used for actuation as they plug into the V5 brain and control the flow of air through the system (and can be programmed). This is the main way that teams will interact with pneumatics on the robot through programming (see Pros guide for more). The Pressure Regulator is used to control the pressure released from the reservoir to the solenoids. Placed near the reservoir in the system, the pressure can be increased or decreased as needed.
Pneumatic cylinders are the third subsystem of pneumatics and are where the motion comes from. In Vex, there are both single, and double-acting cylinders. Single-acting cylinders are powered outwards and then released with no force in the other direction. Double-acting cylinders on the other hand are powered in both directions with the same amount of force. The two do have different types of solenoids though.
Pneumatics consist of seven major components:
Tubing
Physical carrier for the pressurized air.
Reservoir
Above is an ideal system. At the bottom of the reservoir is the bike pump fitting to refill and pressurize the reservoir. The top is the valve for tubing where a pressure regulator could also be installed. Following the tubing is a T-fitting which is used to move air around the system and robot. Following the fitting are the solenoids (with 2 more valves on each) and the drivers (the wires extending out) followed finally by the solenoids.
To program pneumatics, they act as a generalized digital output that can be controlled with whatever ADI API is provided on your respective programming languages. Learn more
MTBR (Michigan Task-Based Robotics)
Max Johnson (BLRS)
Andrew (GOATS/977Z)
As robotics is an expensive club to run, as shown by the financial breakdown in the previous section, sources can be gathered to help fund your organization.
The most direct way to receive funding for your team is through a parent organization, such as a school or umbrella organization. When forming your team or teams, it is important to reach out to school or organization administration, to inquire about the status of club and team funding.
Collecting member dues is another way to raise funds from within your team. Charging a set amount for each team member to join very likely will not cover the full cost of running a VRC team, but can provide a smaller cushion to help with various costs. Especially among larger teams, where the dues can be a smaller amount paid by more members, member dues can add up to enough to help eliminate expenses.
With the increase in costs for many V5 parts, especially for electronic components, teams will certainly need to fundraise more. With thousands of dollars being spent on parts, registration, and not to mention travel, it is a major investment. Raising such a large amount of money can certainly be daunting and bake sales alone likely won’t help to achieve this goal. Asking parents and friends for donations might work, but your results will vary.
When companies donate, they will usually only donate to teams that offer a tax-deductible option. This automatically applies to public schools, but private teams would need to apply for the 501(c)(3) status using Form 1023-EZ, which is faster and shorter than the previous Form 1023. While the application fee is $275, it is the single best step you can take in fundraising.
This packet should include a welcome letter, contact information, what VEX is, awards, budget for the upcoming season, sponsorship levels, and any other relevant information about your team. Most of these categories are self-explanatory, but should also discuss sponsorship levels and a budget in more detail.
Companies want to have different options on how much they would contribute to your team. For instance, they may start with $250 the first season and give $500 the next season if they see the team is performing well. Also include the benefits of each level (logo on the team shirt, website, banner, etc).
A budget is often overlooked. Companies will want to know how a team plans to use the money. The more detailed the budget is, the more likely it is for a company to contribute to the team for the long term. The main categories to include are parts, registration fees, tools, and marketing.
Be sure to always attach a sponsorship packet when you email a company.
Companies nearby will be the best shot at gaining a sponsor. Not only this, they will usually respond faster, as there are typically fewer steps in determining whether or not they want to donate. Additionally, don’t limit potential sponsors to tech companies. Reach out to law firms, dentists, banks, etc, and try researching which companies donate to other nonprofits in the area as a starting point. The majority of a team’s sponsors will likely be within a ten-mile radius of their headquarters.
Larger companies and nonprofits will typically offer grants which robotics teams (or any organization) can apply for. While these may result in gaining more funding, the review process for these applications can take four to six months, or even longer. Be sure to start early if the team chooses apply for grants and take note of the deadlines.
Have a former team member who works at a notable company? Does where a teammate’s parents work offer donations? Don’t be afraid to pull connections from team members.
The best way to get a response is by sending an email first, waiting three weeks for a response, and then following up with a phone call/email. Don’t worry if very few companies reply at first. Just be persistent and keep trying. The truth is that you’ll never know who will sponsor your team.
To build long-term relationships with sponsors, updating them about build progress and performance at competitions will make it more likely they will choose to sponsor the team in the following seasons. If possible, inviting them to competitions or meetings to showcase the team is also a good way to keep the relationship intact.
Grants and scholarships are one of the fastest ways to gain large amounts of funding for new or expanding organizations. These often come from large companies (Fortune 500, S&P 500, DOWJ index, etc) as well as nonprofits or schools.
The best way to find these is to look at a company that has a presence in the local area (office near organization, funding other local organizations or programs) and to a few internet searches for grants that they fund. Once a grant or scholarship is found, look for application schedules, application requirements, and goals of the funder. From there work through the application process while focusing on achievements of the organization seeking funding, and community impact of the organization (educating students, volunteering, larger research projects, etc.).
Another way to get grants is to find a person at a company that will fund you personally. Lots of large companies will either match donations from an employee or make a direct donation to an organization. To find an employee, find alumnae, parents or involved members in the community that either work for a large company, or may have a connection. Reach out to them and ask if their company has any programs for funding student organizations or other educational grants. Be super friendly, and again focus on the goals and achievements of the organization seeking funding.
Competitions are a great supporter of organizations. They both help gain name recognition, qualify teams for other competitions (regional events, signature events, and worlds), and can provide lots of funding for a club. This is done in many ways. Registration fees paid by every team attending the event are split between REC Foundation and the hosting organization. A VRC event will range from $60-$85 per team most of the time where the majority of this will go to the event organizers. Concessions can also be a large source of funding (especially for larger competitions) with both snacks throughout the day and larger lunch orders by team (Pizza, hoagies, etc.).
The best way to get the most funding from the competition is by planning ahead and asking for favors. If a team is coming and they own a field, ask them to bring it, waive their registration for a team, and save the money from buying a new field. Ask for donations for concession foods (bake sale, local stores, etc.). Get corporate sponsors. Lots of companies love seeing students learning engineering and computer science so reach out to some to see if they will help out by giving a location for the competition to be hosted or by funding or donating to cover costs.
(Purdue SIGBots)
(Wilton Robotics)
Gears and sprockets are both used to transfer motion from a powered to an unpowered object, with the difference between the two being how they carry that motion.
Gears transfer motion by meshing with each other, turning other gears in a sequence/ratio. They are ideal for covering shorter distances, or larger distances with a long gear sequence. It should be noted, however, that the more gears are added to a sequence, the more friction and energy loss incur, reducing the overall effectiveness.
In addition to carrying motion in a 1:1 ratio, gears can be used to amplify and detract from the speed and torque generated by the motor. For more information on ratios, click here. Gears are produced in the following varieties, differentiated by the number of teeth on each gear:
In addition to the different sizes of gear, gears are also produced in both low and high strength thickness grades. Both high strength and low strength gears can mesh with one another.
Sprockets transfer motion by using chain to link multiple sprockets together, as individual sprockets themselves should not be physically meshed together. They are ideal for covering longer distances with minimal moving parts, or in scenarios where gears cannot be properly spaced. Although sprockets and chain are more flexible than gears, chain carries the inherent risk of snapping while in use, rendering the driven component motionless.
Similar to gears, sprockets can also function in a ratio. For more information on ratios, click . Sprockets are produced in the following varieties, again being differentiated by the number of teeth:
As described in the chart, sprockets are produced in a both high and low strength varieties. Unlike gears, however, low and high strength sprockets are linked with different size chains, making it impossible to mess high and low strength sprockets.
The use of chain tensioners provides additional stability to large chain routes on a robot, reducing the likelihood of chain snapping during competition.
Chain tensioners are often created by use of a , with the exception of using free-spinning spacers instead of metal to rotate on the screw. As such, no bearing is necessary, as the screw will be stationary on the metal, and spacers require no bearings.
(Purdue SIGBots)
(Yokai Robotics)
Tank drives are a very popular type of drivetrain used in the VEX Robotics Competition. These drives consist of two separately controlled sides of parallel wheels, which allows for precise control of the robot. This allows for greater maneuverability and control over the robot's movement, which can be important in competitions where speed and agility are key factors. Additionally, tank drives are relatively easy to build and can be modified and adjusted to suit a variety of different competition scenarios.
Advantages and Disadvantages: The Tank Drive is very simple to build and consistently performs well. Many former world champions have used the Tank Drive for its simplicity. However, it suffers both from being able to be pushed sideways and from an inability to strafe.
One solution to the problem of being pushed from the side utilizes and is sometimes referred to as the "Bling Drive":
The reasoning behind and process of making locked omni wheels is explained in . Twenty-four 0.5" screws can be used to make one locked omni wheel. The locked omni wheels should be placed in the center of the robot (more or less in line with the robot's center of gravity) to optimize turning. In addition, only two locked omnis should be used per robot, as more will create difficulty turning and possibly damage the wheels.
This type of drive was utilized by and by . The locked omni drive was common in Vex Turning Point because of the defensive nature of the game.
An alternative to locked omni wheels which is becoming more prevalent is wrapping a Vex traction tire around a 30-tooth sprocket as shown in . This diameter of this assembly is very close to the diameter of a 4" Vex omni wheel, making it a viable alternative for those who don't wish to lock their omni wheels.
The tall and controversial scissor lift.
The scissor lift is named because of its overlapping metal bars that open and close similarly to scissors. Scissors lifts are comprised of two sets of overlapping bars, one on each side, that are able to freely rotate in respect to one another. The lift can be as simple as two crossed bars on either side of the lift, but it can also contain many repeated iterations, stacked vertically, of the first one and be able to extend to many feet off of the ground. The upward motion is created by motors located at the base of the lift that move one edge (either the front or the back) while the other edge remains stationary but is allowed to rotate. Moving the two edges closer together will extend the lift upwards and moving them apart will lower it.
One of the biggest advantages of a well-designed scissor lift is the fact that the weight of the load will always remain over the base of the robot and thus help the robot to remain upright. With lift systems like the four and six bar lifts, the load will be moved up in front of the base which can cause the robot to fall forward. Another advantage of the scissor lift is its collapsible nature. A scissor lift can often compress to almost completely flat which allows for the robot to fit within size restrictions or pass under overhead obstacles, such as those that appeared in the Toss Up competition. One of the issues with scissors lifts is the precise calibration that they demand. Both the left and right sides of the lift must move up and down in almost perfect unison. If the two sides are not aligned properly, the lift may start to bend to one side or another. This could cause a loss of game object due to a non-horizontal containment field or cause the robot to tip over due to a center of gravity that is no longer above the base of the robot. In order to prevent this, the lift must be carefully constructed, constantly inspected, and the code should take advantage of many sensors to ensure that the motors controlling the lift are working at the same speed and power.
There are 2 main parts to a competition. There are qualification matches, and elimination matches. During the qualification matches, teams are competing in random matches to rank higher going into elimination matches. In elimination, teams follow a bracket in single-elimination matches until the competition winner is decided in the finals matches.
In the above schedule, you can see that there is a very early start and a lot of movement throughout the whole day. Below, the schedule will be broken down a little bit.
Linear punchers are one of the simplest, yet most effective ball-launching mechanisms. The name of the mechanism comes from its linear actuation and the forceful impact on the ball that sends it flying.
A couple of things to note about the design:
The shooting is powered by rubber bands (not shown, but connected from the standoff on the back of the rack c-channel to the front of the assembly)
The puncher is drawn as the rack and pinion set moves the rack away from the ball, and then when the shaved section of the pinion gear reaches the rack, the rack is released and shoots forward







Space efficient
High forwards traction
High forwards traction
High maneuverability
Reduces compression due to each wheel
High horizontal traction
Can add traction wheels later if desired
Reduces compression due to each wheel
Low forwards traction
Low traction from side
Low maneuverability
Low horrizontal traction
Medium maneuverability
Does not allow for later traction addition





3.25" Anti-Static Wheel
1.00
3.25
4" Anti-Static Wheel
1.00
4.00
2.75" Wheel
0.75
2.75
3.25" Traction Wheel
0.75
3.25
4" Wheel
0.875
4.00
4" Wheel w/ High Traction Tire
0.75
4.00
2.75" Anti-Static Wheel
1.00





2.75
1.00
2.75
3.25" Omnidirectional Anti-Static Wheel
1.00
3.25
4" Omnidirectional Anti-Static Wheel
1.00
4.00
2.75" Omnidirectional Wheel
1.225
2.75
3.25" Omnidirectional Wheel
1.00
3.25
4" Omni-Directional Wheel
1.125
4.125





2.75" Omnidirectional Anti-Static Wheel
Pressure Regulators
Valve to regulate the pressure of air in the system.
Finger Valve/Flow Switch
Simple on/off switch for airflow.
Solenoids
Control components that turn electrical signals into commands for pressurizing the system. Connected to both V5 Brain(requires drivers) and Pneumatic tubing for control.
Cylinders
Linearly actuating component
Reservoir Valve
Used for attaching tubing to reservoir
Solenoid Valve
Used for attaching tubing to solenoids
Cylinder Valve
Used for attaching tubing to Cylinder
Pros
Cons
Best height to weight ratio (for a tall lift)
Minimal lifting recoil
Minimal center of mass shifting
Potential for a very large mounting platform for holding many game objects or larger subsystems.
Vex parts linear slides are sub-optimal due to their high friction
The resting position of the lift is high
Requires a large number of parts (specifically C-Channels) compared to other lifts.
Below is a video from 53999f showing scissor lift optimization. Although not built in an ideal way, it does a great job in showing the potential optimizations that can help improve the scissor lift.
As shown in the video above, cross bracing and other bracing is used to help further stabilize the lift. This is crucial given the height of the lift, so both sway and other movements do not effect the lift's functionality.
Since the scissor lifts have terrible friction when built with VEX linear sliders, some teams have found an alternative in this by building their base with a gear mechanism. This reduces the friction and increases mechanical efficiency when built properly.
Below are some examples, all credits belong to their respective teams.
This building technique is something that is often overlooked as the stigma behind scissor lifts (hence the controversy) is the reason most teams do not even take this design into consideration. However, by using gearing rather than linear sliders the largest downside of using a scissor lift can be overcome.
Scissor lifts are generally harder to build than Double Reverse Four Bars. However, its advantages over the DR4B should not be overlooked. Most notably, its the much higher maximum size, its relatively stable platform, and its potentially large platform size for mounting other subsystems. When deciding which lift to build, teams should consider what the right tool for the right job is as well as if their members realisitcally have enough skill for certain lifts, as scissor lift construction has a very high skill ceiling.

Doors Open
This is the first chance to get into the competition venue and set up the team's pit. Most likely the team's pit is a table with some chairs, some outlets (very limited), and a sign with your team number. Get in early to find your pit, get familiar with the venue (look for competition fields, skills fields, judging areas, and restrooms).
Registration and Check-In
Here, teams need to go to the registration table and check-in with the Event Partner or volunteers. There will be a list of all teams and the team will be asked for any remaining paperwork that is needed (team registration, photography release, covid screening, etc.). Be prepared with everything required by the EP to make this go smoothly. Additional information for the event may also be given at this time (lunch orders, venue map, etc.).
Drivers Meeting
Here, the head referee will introduce themselves and the referee team. They will likely go over some rules that are commonly broken by teams and introduce the general layout of the competition. Here is a great time to ask about any recent Q&A posts as well as rules that might be unclear.
Tournament
Here are the qualification matches for the day. They will be discussed later but most likely, each team will play 6-8 matches allianced with and against randomly generated teams. These matches will determine the ranking for elimination matches.
Lunch
Teams are normally given about an hour here to eat, and often run skills runs. Events will often give the option to order food (most likely pizza) or teams can bring their own food or run out for something. Qualification matches resume promptly after this and this break can be shortened to make up for delays so be sure to listen for announcements and stay in earshot.
Alliance Selection
After all qualification matches are played, a ranking is given to each team. The top teams (normally 8-12) get to choose another team to alliance with through the elimination rounds. Starting from the number 1 seeded team, teams take turns selecting a team. The chosen team can decline, however, once they decline, they cannot be chosen by another team. After all, alliances are formed, elimination matches are played.
Awards
Event Partners, Volunteers, and Judges give awards here based on the outcome of the day. The quantity varies by each event but generally, there is excellence, design, and 2 tournament champions along with others at the EP's discretion. All of this is laid out on robot events for each competition as well as what each award qualifies a team for.
Above is an example match schedule that a team might see in a day (In the Vex Via app). The above team will be playing 8 matches which is slightly above average (expect 6-8). Each of the above matches is randomly assigned as per the game manual. The time between matches is ranges drastically though so it is important to keep track of current matches and arrive roughly 5 minutes before matches. Before each match, make sure to also talk to alliance partners before the match. Discuss robot functionality, strategies, opponent research, and anything that might be relevant to the year's game.
Safety Glasses, Safety Glasses, Safety Glasses
Every person who will come to the field needs to have a pair of safety glasses or they will not be allowed to stand there. Some events will allow students with glasses (for vision) to not wear a pair of safety glasses but still bring another pair just to be safe.
Back-up Batteries
Matches will come up close to each other in the schedule and chargers will not be fast enough to keep one or even two batteries to be fully charged at the start of each match being played. At least 3 batteries is recommended for a standard competition to be safe and not add extra stress.
Back-up Motors
If possible, bring extra motors and cartridges. It is possible for motors to break during competitions whether it be from over-use or by being hit during a match. Also bring extra wires and zip ties (anything needed to replace a motor). Cartridges will also sometimes break or often wear out / need grease and make a robot perform poorly.
Tools!
Bring whatever tools you can. It would be best to have several sets of Allen keys, screwdrivers, and nut drivers. Power tools are not recommended but there are often areas for cutting (so bring a hand saw and file) as well as sometimes Dremel cutting tools or drills. It would also be a good idea to bring a set of screwdrivers, a nut driver, and a wrench to the field.
A Field Go Bag
Teams will have to run back and forth to the fields for matches and will not have time to run back to their pit for something right before a match so a small bag is a good idea. In here, have some extra screws and nuts, zip ties, rubber bands, and a set of small tools. Also, try to keep an extra battery here.
Limited Parts
It is common for teams to want to bring everything they own to each competition in case something breaks. Keep in mind that the pits will be crowded with limited space and no rebuilding should be taking place at a competition. Bring some metal, some gears (to replace current ones. not every size), some backup Lexan, and hardware.
Game Elements
There will not be easy access to game elements for practice or testing during competitions most likely. Do not bring large pieces (Turning Point Platforms for example) but smaller elements are very helpful.
The rack shown in the photo is stopped from exiting the assembly by the horizontal bolts with black spacers.
Linear punchers are used most commonly when needing to launch an object (normally a ball), a far distance. In the past, they were used in Turning Point (2018-19) and in Nothing But Net (2015-16) where teams needed to launch balls (relatively small) across the field. In the case of Turning Point, they were often used because they could be used in different points on the field with angle-changing mechanisms.
There is no single best method for creating a puncher. Different game objects require different mechanisms, but there are a number of best practices.
Use a short linear slide length. Longer slides have more power but suffer from high friction. Shorter lengths have less friction, and higher consistency, and will increase the lifespan of the rubber bands.
Make sure the rubber bands are parallel with the linear slide. If the rubber bands pull the slide up or down, it will add friction and reduce exit velocity of the ball significantly.
The slide should have a loose fit in the slide trucks. This can be achieved by filing the slide trucks down. The extra slop is negligible on performance, and the reduction in friction is massive.
Utilize some form of lubrication to reduce friction even further. Common choices for lubricants are white lithium grease or graphite
Some modifications that could be done to the linear puncher include adding a ratchet system that would allow the puncher to stay in place when pulled back. This would be good in scenarios that would require you to quickly launch the object, rather than having to pull back the puncher before firing. Another modification that could be done to the linear puncher is including an angle adjuster to modify the trajectory of the shot. This can be integrated with other sensors such as the vision sensor to create automatic or assisted aiming for the driver. Below are examples of the angle adjust and ratchet system:
Pros
Cons
Relatively compact compared to other launchers.
Easy to build.
Loses no energy to spin.
Less violent firing action than a .
Shaving a gear down may be hard to do for beginners or too costly for teams that are short on parts.
Lots of wear and tear on the back stop over time.
Slower fire-rate than a .
BLRS (Purdue SIGBots)

Gear Sizes:
12 Tooth
24 Tooth
36 Tooth
60 Tooth
84 Tooth
Low Strength
High Strength
10 Tooth
6 Tooth
15 Tooth
12 Tooth
24 Tooth
18 Tooth
40 Tooth
24 Tooth
48 Tooth
30 Tooth
Other lifts that could possibly be found on robots
Compared to other lifts found on robots, the two bar is one of the easiest and lightest lifts to build. Usually consisting of 4 c-channels (2 used for the tower and 2 for the lift), the two bars are usually used when a robot would like a lift, but one that does not take a lot of space. One of the main downsides and features of a two bar is that the orientation at the end of the lift stays constant despite lift angle. In addition, compared to other lifts, the two bar cannot carry as much weight compared to other lifts. Some examples of the usage of the two bar lift can be found in the game Tower Takeover as shown above.
Make sure the c-channel is secured on the axle of the motor
Make sure the axle is secure in the motor.
If possible, use a gear ratio with a screw joint to reduce slop and increase torque of the motor.
With a similar appearance to a 2-bar, the chainbar has the compactivity of a 2-bar but with the capability to keep its mounting orientation constant throughout its movement.
This is done by adding a fixed orientation sprocket at the base of the lift bar, and then adding a free-turning one at the end of the lift bar with both being constrained by chain. If an intake or mechanism is mounted on the sprocket(s) at the end of the lift, the mechanism will maintain the same orientation throughout the lift's movement.
Best practices for 2-Bar also applicable here
Make sure chain is tight, avoid using mechanical tensioners as seen in picture above if possible to increase mechanical efficiency.
Try to keep the mounted intake or subsystem light, to reduce load on chain.
Example: NorCal 2021 Robot (View in .5x or full screen):
Example:
A cascade or elevator lift is a lift that provides an immense amount of height, while taking not a lot of space. It utilizes c-channels, sprockets, and chain to connect each bar together. These bars run parallel to the structural frame of the lift, which is connected to the chassis of the robot. Issues that are prevalent among cascade lifts is the lack of support found on the lift, as when fully extended, the linear characteristic of the cascade lift could cause issues in preventing the lift from failing. In addition, the difficulty in tuning and repairing cascade lifts due to its compactness makes it difficult for quick repairs or adjustments when failures do occur.
Reduce friction between the c-channels
Make sure the chain used is tight
Try to reduce weight of structural c-channels by using thinner c-channels or aluminum without degrading structural stability.
(Purdue SIGBots)
Flingin' things
A catapult is a launching mechanism that utilizes rotational movement in order to fire objects. This is achieved by rotating an arm where an object placed at the end will gain momentum in the desired direction, and abruptly stopping the arm so that the object will continue its trajectory through the air. In VEX, catapults are often chosen because of their versatility, as they are able to easily launch any object regardless of shape or size, as well as being able to launch multiple objects simultaneously. Catapults have made several appearances throughout previous games, such as the 2013-2014 game Toss Up and the 2018-2019 game Turning Point.
Catapults powered by elastics (rubber bands, surgical tubing, etc.) are the most versatile and widely used method of applying force. There are many reasons why this is a popular design choice, however there are some drawbacks.
One of the benefits listed above was the ability to power an elastic catapult through a variety of ways, which are discussed below.
Slip gears are one of the ways where the rotational force of a motor is utilized to draw back and fire an elastic catapult. A slip gear is a gear that has several consecutive teeth shaven off, so that another gear driven by the slip gear will "slip" when it rotates to the section of the slip gear that has no teeth. Slip gears are often used in tandem with ratchets, to reduce the load on motors. These components are also commonly used in .
For elastic catapults, the arm of the catapult is attached to a gear that is being driven by a slip gear. When the slip gear is rotated so that the shaven teeth are not engaging with the gear of the catapult, the catapult arm is able to rotate freely, allowing the built up tension from the elastics to rotate the catapult in the opposite direction.
Below is a video demonstrating how slip gears are used on catapults:
The more elastic force applied on a catapult, the more torque the motor will need to provide in order to draw back the catapult. To accomplish this, gear ratios can be used to increase the output torque of the motor. For most catapults, a simple gear ratio of 1:5 or 1:7 can be used with 100 rpm motors. However, compound gear ratios can be used to fine-tune the output torque of your motor, so that you can power your catapult more efficiently.
Beyond slip gears, there are many other innovative ways to power a catapult which can be used to achieve the same effect:
A nautilus gear/cams utilizes the changing outer radius to draw back the catapult, and fire when the radius drops off, as seen in this video:
This method of powering allows for a fast rate of fire, without the need of using slip gears:
can also be used in a catapult to launch objects, as the quick actuation in tandem with a lever arm can be used to send objects flying through the air. As with elastic catapults, there are many pros and cons to this type of catapult:
Pneumatic catapults were extremely popular in the 2013-2014 game Toss Up, where teams would use pneumatics to launch the large, inflatable balls, as seen in this reveal video:
Tuning a catapult to launch an object a specific distance can be tricky, so having the proper understanding of how certain factors can affect your shot can make a big difference in your catapult. There are three main aspects of a catapult that contribute to the arc of your object:
The rotational speed of your catapult arm is the most obvious component of a catapult. The faster your arm swings, the faster your object will travel through the air. In VEX, the main contributor to the rotational speed is the amount of force that is being applied to your arm, whether it be rubber bands or pneumatic pressure. Increasing this will result in an increase in both the horizontal and vertical direction of your arc, and a decrease will do the opposite.
The distance between the object and the point of rotation, or the catapult arm, is very closely related to the rotational speed, and has similar effects. If an arm has a constant angular speed, then an object placed farther away from the center will have a faster linear than an object placed closer to the center. Because of this, catapults with longer arms will be able to launch objects further, and vice versa
Tuning the launch angle of a catapult will allow you fine tune the trajectory of your ball. The vertical height and horizontal distance of your trajectory will have opposite responses to a change in the launch angle. For example, if you change the launch angle to increase the vertical height of your object, then the horizontal distance will decrease, and the same is true for the other way around. Below you can see a diagram of how different launch angles result in different heights and distances. In VEX, the launch angle of a catapult can be changed by implementing or changing the hard-stop of the catapult. The hard-stop is what prevents a catapult from rotating past a certain angle, so changing this angle will change the launch angle.
With VRC drives becoming more powerful, Defensive Mechanisms can help give teams an edge when it comes to defensive play.
With robots competing in the VEX Robotics Competition becoming more and more effective on average, defensive play is becoming more common as a strategy used to slow down the scoring of opposing teams. In order to become more effective at defensive play, and stifle the effects of defensive play used against your robot, various mechanisms outlined below can be implemented.
One of the key tasks in taking control of a match with the use of defensive mechanisms is to get the upper hand on mechanical advantage. Wedges are a common way to do this with two key benefits. The first being that when a robot is partially lifted off of the ground, it has less traction and therefore can be pushed easier. The other key benefit is the addition of the normal force from the lifted robot to the robot with wedges. This gives the instigator mechanical advantage with added traction and stability.
There are two main variations of wedges, the first of which takes its shape in the form of long, narrow pieces of material designed in a way that there are multiple spaced across the length of a robot. The advantage of having separate, narrow "forks" is that the smaller surface area may be able to exploit smaller infrequent vulnerabilities in an opponent's ground game, or uneven surfaces that are small enough for a wedge to slip in and lift up the robot.
The second main variety of wedge is a much longer, unibody wedge that spans an entire side of the robot. The main advantage of this variation is ease of use - with one long sloped surface, it is much easier for the driver to get the wedge under an opposing robot. In addition, this variation of wedge is more easily able to function as another mechanism of the robot. For instance, the wedge pictured below doubled as a method to raise mobile goals off of the ground and into a pneumatic clamp.
One similarity across all variations of wedges is that they are all relatively low to the ground. By achieving this low ground clearance, forks stand a better chance of getting underneath or other low areas of an opposing robot. One thing to consider when designing wedges of any type is to make sure that the wedge does not dig into the field tiles, as that would violate the rules of the game. This can be accomplished by wedges having enough clearance to be clearly elevated above the ground, or by adjusting the shape of the wedges to be rounded, so that they ride over the field tiles while still being very low to the ground.
In order to prevent wedges from getting under a robot, skirts have become one prominent tool in securing the ground game. Rather than acting in an offensive fashion, such as , skirts defend a robot by extending its ground clearance to almost floor-level.
Skirts are typically mounted to the robot in a sloped fashion, such as in the picture mounted above. When a robot is engaging in defensive play, pushing a robot from the side with a sloped surface can cause the offensive robot to ride up the skirt slightly, losing traction and mechanical advantage - the main exception to this being if the offensive robot can get wedges under the defensive robot, lifting them instead. Keeping that exception in mind, it is important to design skirts to be as low to the ground as possible or alternatively, fold out of the way if lifted from the bottom.
In addition to the ground game mechanisms defined above, defensive wheel setups are a popular way to prevent defensive play from being as effective on a robot. Both mechanisms defined below, Traction Wheels and Drop-Centered Wheels, revolve around preventing a robot from being pushed around as easily and are often used in conjunction with each other.
Traction Wheels are, as the name implies, wheels added to the of a robot to increase the amount of traction a robot has with the ground.
Traction wheels can be constructed in numerous ways, the most common of which is by using a flex wheel as the middle wheel of a chassis, though other ways could include using the stock traction wheels sold by VEX or stretching a traction wheel tire over a sprocket, as pictured above, to increase the outer diameter and function as a traction wheel.
When adding traction wheels to a robot, it is important to consider where on a drivetrain the traction wheels are located. This is because the farther the traction wheel is from the center of the drivetrain, the more the center of rotation will be offset. This would be due to the traction differential between the two sides (front to back) of the drivetrain. In addition, it would be inadvisable to use traction wheels on a holonomic chassis, due to the increase in traction.
Drop-Centered Wheels are another method of increasing traction on the field. With drop-centered wheels, one wheel on each side of the chassis is mounted or stretched to be slightly larger than the other wheels. This enables the drop-centered wheel to be pressed slightly more into the chassis by the weight of the robot, increasing the traction of the wheel. When drop-centering a wheel, it is important to make sure that the difference between wheel locations is not extreme, as too much of a drop-center can make a robot considerably easier to tip.
Defensive wings are a strategy more commonly used by VEXU teams that are designed to block opponents from portions of the field without having a fully deployed wall. Defensive wings are usually retractable.
This design is shown below in 2 VEXU robot designs. In Change Up, YNOT used these wings to block teams from half the field after autonomous, with the ability to continue match play later after wings are retracted.
Similarly, BLRS used a similar mechanism in Turning Point in order to control robots with more contact area allowing blocking from portions of the field.
(Purdue SIGBots)
May - Game Reveal
At the end of the Vex Robotics World Championship each year, the game for the following season is announced. At this time, teams can order Game/Field Elements, read over the rules, and begin planning for the following season.
Since this is also the time of year that High School seniors are finalizing their college decisions, it is likely that some incoming Freshmen will contact teams. It is often a safe practice to delay robot design decisions until the next semester begins so that ALL recruits/incoming members have the ability to actively participate in the team.
This is a great time to work out logistics of the VexU team for the following year. Discuss topics like officers, budget, goals, etc. while there is still time to plan and not get distracted by robot designing.
August - Fall Semester Begins
This is the most common start time for US universities, but it may fluctuate. This is when the majority of recruiting & onboarding for new members should take place. It is best practice to take the first few weeks of the semester to advertise the team on campus, host a call out meeting, and wait on designing the robots until you have members onboard and on-campus.
December - Early Season VexU Tournaments Begin
Since the majority of VexU teams don't touch their robots until September/October, the earliest competitions are normally in the middle of December each season. If there are no competitions nearby, running skills at a VRC event or hosting a scrimmage is a great way to set a deadline for the team without having to travel far.
January/February - Majority of VexU Tournaments
The vast majority of VexU competitions take place between January & March. Check the for more information about how teams can qualify to the World Championship each year. VexU often times has a limited number of events as well, so expect to need to travel some distance to competitions and scrimmages.
April - Vex Worlds
Historically, the VexU world championship has been alongside the VRC Middle School, and VRC JROTC world championships. This is typically the last week in April, or the first in May. RECF will announce dates & venues for each coming world championship in June/July during the Event Partner Summit.
Since the final invitations for the world championship do not get sent until late March, it is oftentimes helpful to begin planning transportation/lodging before a team becomes qualified for the event. Ensure that refunds are possible with any reservations if this approach is taken.
The first thing that has to happen when starting a VexU team is to find a group of students to participate. Most often, for new VexU teams, this comes from a group of students who competed in VRC joining together at a university. If there are enough students to start the club, hanging flyers around campus and hosting a call-out meeting to explain the program are a great way to generate more interest in the team.
If there is known interest on a university campus, the process of having the university recognize the club can begin. Different schools will have different requirements but the core is most commonly a group of student officers, and a faculty advisor. A faculty advisor should be able to help with the majority of the process.
Becoming a recognized student organization should help with the majority of aspects needed when starting a VexU team. This will vary by university, but Registered Student Organizations (RSO) often receive access to a bank account, university email services (for joined accounts), and assistance with finding a workspace.
This will be one of the most difficult aspects to creating a VexU team as space is limited & expensive at most universities. The space does not need to be fancy by any means, but there should be room for the 12'x12' field (ideally with walking space around it), 2-3 tables for working (one specifically for cutting), and storage for parts. As a team is formed and begins working, the specifics of a space will change & best practices will be developed, but there needs to be a foundation before work can begin.
Look for space in research focused buildings on a univeristy campus, or often times discarded rooms under the control of a specific school. Often times, universities will have rooms that were allocated for a specific use years ago that is no longer being utilized in that way.
Reach out to university alumni, local companies, and STEM education programs for funding. Learn more about budgeting and funding options in our articles.
Learn more in our Robot Events articles.
Depending on the size of the associated university, there may be guidelines for the branding of a team. If a team is associated with a university, there will likely be branding guidelines and limitations as to how one should present the university. Regardless, it is best practice to develop a branding guide for the team that has primary colors, fonts, and formats of the team's logo.
The best way to begin branding is through social media like Instagram to share what the team is working on & show off sponsors alongside upcoming events.
Joints are attachment points between components used to create mechanisms based on rotation.
These are the four most common types of Vex Joints:
Single Bearing Screw Joint
Compact Screw Joint
Low Strength Axle Joint
High Strength Axle Joint
This is the go-to joint in Vex for low-torque rotation applications. Because it is securely fastened to one of the two components, it effectively halves slop and reduces friction in the process. It also benefits from the round shape of the screw combined with the round interior of the bearing.
Assembly: This joint is assembled by first securing a screw to one component with a keps nut and attaching a bearing to the second component. Then the screw is placed through the bearing and secured with a lock nut.
Each of the components can be seen in the model above, which are listed below:
The c-channel that the joint is mounted to, which is typically mounted to the base
The screw that the arm rotates around
The keps nut that fastens the screw to the first c-channel
The c-channel that is rotating
Examples:
This screw joint is used to attach the rollers to an anti-tip mechanism on . Since the holes in the rollers are round, they rotate freely and with little friction around the screws.
This screw joint is used to mount one bottom four-bar of . This mounting solution allows for low friction on the lifting joints, and with 12 of these joints in total, minimizing friction on each is important.
This is a high-slop joint which is effective in applications that require compactness. If there is room for a single bearing screw joint, however, the single bearing screw joint is preferable.
Assembly: This joint is assembled using a shoulder screw, which is seated more tightly in the metal than a conventional screw. The screw is placed through one component, followed by a washer, followed by the second component and is secured with a lock nut.
Each of the components can be seen in the model above, which are listed below:
The c-channel that the joint is mounted to, which is typically mounted to the base
The screw that the arm rotates around
The washer that is between both c-channels, which reduces friction from the c-channels rubbing together
The c-channel that is rotating
This is a high-friction, high-slop joint which is used in applications which involve a motor or gears, since a screw joint would not be able to translate rotation the way an axle joint does.
Assembly: This joint is assembled by first securing one bearing to each component. Then, the axle is fed through both bearings, with a spacer in between, and secured using a shaft collar at either end.
Example:
This low strength axle joint is used on one lower gear of . Although the other gears use screw joints to minimize friction, this one utilizes an axle to translate the gear's rotation to a potentiometer, which measures the rotation of the gear to determine the lift's height.
This is a high-friction joint which is very effective in high-torque and cantilevered (only supported on one side) applications due to the strength of Vex High Strength Axles. This joint should be used only in very high-torque operations, as it does produce more friction than a single-bearing screw joint.
Assembly: This joint is assembled by first reaming or drilling (drilling is preferred, but reaming is an acceptable alternative) a 1/4" diameter hole (or slightly larger to accommodate for wiggle) in both components, securing a high strength bearing to each. Similarly to the low strength axle joint, the axle is fed through both bearings with a high strength washer between and two high strength collars to secure it.
Example:
This high strength axle joint is used on . Because it needed to lift several cubes, this high strength option was used rather than a screw joint. This lift also benefits from the long high strength axle connecting the two sides, thereby reducing tilt.
(Jackson Area Robotics)
Simplify robot construction with hex nut retainers and standoffs retainers.
Retainers are nylon, hexagonally-shaped parts which have varying protrusions depending on the type of retainer used. There are two overarching types of retainers: hex nut retainers and standoff retainers. Hex nut retainers all feature 11/32" wide hexagonal bores that are meant to keep 11/32" wide 8-32 nuts of any type captive. Similarly, standoff retainers can keep any hexagonal fastener that is 1/4" wide (such as a standoff, narrow hex nut, or 4-40 nut) captive in its hexagonal bore. The resulting captivity of these fasteners allows the user to forgo using a crescent wrench altogether, as a screw can easily thread into the nut or standoff without any way for that fastener to rotate.
There are three types of retainers sold by VEX Robotics which come in both hex nut and standoff retaining forms.
The most versatile of the three, the 1-post retainer simply keeps a nut or standoff captive for a screw to then thread into it. Like the name suggests, it has a single nylon post protruding out from it with a square peg that can extend through two surfaces of VEX aluminum, such as two . This square peg is around the same size as common VEX square holes, allowing it to fit snugly into the hole.
Although less commonly used, the 4-post retainer can be a massive time-saver when developing perpendicular structure. Unlike the 1-post retainer, this retainer has four square pegs that surround a captive nut or standoff. Since the four square pegs also extend through two surfaces of aluminum, it completely eliminates any chance for play between two surfaces while only requiring one screw and one nut or standoff. However, because of the geometry of the retainer, it relies on the metal having diagonal holes, meaning it can only be used with two-hole wide C-channels, two-hole wide , and U-channels, but not with three-hole wide C-channels, five-hole wide C-channels or one-hole wide angles.
Ever helpful with motion components, the 1-post retainer with bearing flat can be a handy replacement for where space allows. The primary purpose of this retainer is to reduce friction where shaft are being used by using encapsulating a shaft with a nylon hole rather than having it contact the square hole of a C-channel. Other than its function as a bearing flat, the retainer otherwise acts the same as the 1-post retainer, and still has a square peg with the same dimensions on the opposite side of the bearing flat hole.
Both hex nut retainers and standoff retainers alike have significant use cases thanks to their fastener captivity ability. Generally, these retainers can serve as a gateway to saving weight on a robot because they make previously obscure fasteners more viable by allowing them to stay captive. For this reason, nuts that would struggle to stay threaded onto a screw when faced with vibration, such as a basic steel hex nut, could be used liberally with the help of a retainer. Some helpful use cases for using a retainer could include:
Attaching a hex nut/standoff retainer with bearing flat on a rotating mechanism to reduce friction while saving weight.
Unlike a normal bearing flat, which requires two screws and two nuts to attach to a robot, a retainer with bearing flat only needs one screw and one nut.
Since a retainer with bearing flat is mounted off-center (the bearing hole is on the side), attention to detail is required to ensure that the retainer properly aligns itself and is flush with the metal.
(Purdue SIGBots)
The mighty Double Reverse Four Bar.
The double reverse four bar (also referred to as DR4B or RD4B) lift is one of the more complicated lift designs used in VEX Robotics competitions. The lift is comprised of two iterations of a four bar lift. One iteration is mounted in the same manner as for a standard four bar lift. The second iteration is mounted at the end of the first iteration at the location where the intake or object manipulation mechanisms would normally be positioned. The second four bar lift faces the opposite direction as the first iteration. This allows the overall lift to rise almost completely vertically as opposed to a single four bar lift that rises forward and up simultaneously. This can be an advantage or disadvantage depending on the desired task.
Double reverse four bar lifts keep the weight of a load centered over the base of the robot instead of lifting it up in front of the robot. To be more specific, the center of gravity of the robot goes slightly backwards before going forwards when lifting a load up. This helps prevent the robot from tipping over. The double reverse four bar lift has a significant height advantage over a four bar lift without the lifting the load in front of the robot. The double reverse four bar lift design is much more complex than a four bar lift or a six bar lift and thus is more difficult and time consuming to build. Double reverse four bar lifts must be carefully constructed, coded, and maintained to ensure optimal functionality. They are more prone to breaking parts and motors than other lift designs.
Crucial for attaching structural pieces to each other.
In the scope of the VEX Robotics Competition, the typical screw will be steel and will have an #8-32 thread size and can have a length anywhere from 0.25 inches to 2.5 inches. However, in VEXU, limits on the thread size, material, and length are lifted.
Of more importance to the user of a screw is the drive style and its specialty features.
Outside of specific mechanisms and subsystems, which have their own section, there is much general information that can be applicable in many applications when building.
Box Bracing is a form of bracing that strengthens a subsystem comprised of c-channels, reducing slop, flexibility, and bending in the aforementioned bars. Box Bracing is composed of two c-channels, facing inwards towards each other, and attached together with a long screw running between both c-channels.
The space between the two c-channels should be filled with spacers wherever a screw runs between the c-channels in order to prevent over-tightening, which can deform the metal. Box Bracing is often used in coordination with other bracing techniques, which can be found .









Utilizing 1-post hex nut retainers to make the following fasteners impervious to vibrations and therefore viable:
Steel 8-32 hex nut
Nylon 8-32 hex nut
Aluminum 8-32 hex nut
Utilizing 1-post standoff retainers to make the following fasteners impervious to vibrations and therefore viable:
Narrow 8-32 hex nut
4-40 hex nut
Using a 1-post hex nut/standoff retainer's protruding square peg to eliminate slop between two pieces of metal while also potentially saving weight in the process.
Rather than using two shoulder screws to fasten the two surfaces together, only one is needed since the retainer's square peg will inherently eliminate slop.
Using a 4-post hex nut retainer to save weight (by only requiring one pair of fasteners instead of two) and eliminate slop at an attachment point of two perpendicular C-channels.
This should only be done in low-stress situations. If done in a scenario where the perpendicular C-channels are likely to become deformed, the structural integrity of the 4-post hex nut retainer is ambiguous.




The bearing mounted to the rotating c-channel, which reduces the slop of the rotating c-channel around the screw
The lock nut that prevents the rotating c-channel from coming off of the screw, but is not tightened down to allow the rotating c-channel to spin freely
The lock nut that prevents the rotating c-channel from coming off of the screw, but is not tightened down to allow the rotating c-channel to spin freely
Pros
Cons
Relatively linear lift compared to single stage bar lifts (e.g. or).
If built properly, can reach higher than a single stage lift on its own.
A can replace the top four bar stage for space or extra height.
Relatively harder to build (and code) compared to most lifts.
Is more prone to issues when asymmetrically built due to having two stages.
Much more heavy and space consuming due to being two stages.
Depending on whether or not the lift needs speed, height, or torque the core design of the lift changes.
Lifts that are designed for height are usually more heavy because they have longer arm lengths and have a series of bracing and supports so that the lift and reach its maximum height efficiently keeping the lift very stable and lifting straight up and down without leaning to the right or left.
Lifts that are designed of speed are significantly lighter than height based DR4Bs so that they have less inertial mass. Things that have less inertial mass are more susceptible to changes in velocity allowing the lift to move up and down very quickly and with significantly reduced recoil.
In reality the lift should designed be somewhere in the middle of tall and fast because a short and slow lift is useless. That's why there is 4 main weight classes of DR4B designs:
Heavyweight
All Round
Lightweight
Featherweight
These terms are fairly arbitrary and are just to group together similar designs. Rather than exact definitions it is better to think of these weight classes as a spectrum and as the lift can take design aspects of each weight class to better fit what it needs.
Heavyweight
This weight class is typically only found in VEXU because of size and motor restrictions. But nonetheless highlights important design considerations to make an all rounded lift more sturdy and stable. It should also be noted that its ability to be used as a 24" robot as a relatively wide lift allows for more cross bracing between the two sides of the lift (as shown in the "Big Chungus" pictures), or potentially another subsystem if the team plans accordingly.
Characteristics:
Powered from bottom and middle
Heavy Top Manipulator
Boxed C Channels
Very Tall
Lots of C Channel bracing
Lots of rubber bands to counteract the weight of lift and manipulator
Strong drive train to be able to move around lift as well as the game objects without getting tired
All Round
An extremely reliable lift with 2 motors that is both quick and tall is easy to do the with the power of V5 motors. This type of lift is going to fit the needs of most applications.
Characteristics:
2 V5 Motors
Powering motors are in the middle
Found with decent amount of cross bracing
Typically done with Double Reverse Four-Six Bars to increase height.
Recommended to use 2 V5 Motors
Powered in the middle
structurally made almost entirely of 2 wide channels
Lightweight
The lightweight weight class is a good option for motor count efficiency or lighter game elements (Example: Cones in In The Zone and Caps in Turning Point).
Characteristics
Potentially could be powered with 1 V5 Motor
Stand off bracing
Can typically be found with half-cut C-channels to reduce weight.
Typically done with Double Reverse Four-Six Bars to increase height.
Lighter weight intakes to reduce strain on lift itself
Featherweight
This design of double reverse 4 bar is a very niche weight class and strips down the "Double Reverse" design to its bare minimum to create a very space efficient lift. These designs typically have another actuating device or lift on the end of the lift and can be used
Similarly to the lightweight class, these have smaller intakes for reduced strain on the lift.
Lift towers are mounted very close together.
Instead of having two sides, the upper portion of the lift in this class normally consists only of one centralized section (as shown in picture above).
Mounting intakes on this lift is typically harder due to the lack of two mounting points on two sides of a normal DR4B.
One thing that may be important to note is that the "Double Reverse 4 Bar" design is just an umbrella term for the "Double Reverse" design as a whole. The "Double Reverse" design is not rigid that requires have 2 four bars. The only requirement for a lift to be a "Double Reverse" design is to have one lift with another mechanically connected lift on top of it. This is important because the main idea of the "Double Reverse" design is to combine the heights of 2 bar lifts. Combine the knowledge of other bar lifts and linkages to be able to design the perfect lift for the job.
The following lifts are not "DR4Bs" and use different techniques to make the lift taller.
These can be regarded as difficult, but they are much more stable, compact, and easy to maintain than other lifts that reach similar heights. This type of lift has been incredibly popular for both the Skyrise and ITZ seasons, and for good reason.

Star Drive, otherwise known by its trade name as "Torx" Drive, is the most common drive style in VEX. It offers the advantage of being generally more resistant to stripping than its hexagonal predecessor, but has the tradeoff of being difficult to purchase at a hardware store. Convenient sources of these types of screws include the VEX Robotics website, Robosource, and McMaster-Carr.
Hex Drive was widely used in previous seasons of VRC, but has since been mostly eclipsed by Star Drive screws. Hex Drive is now largely unpopular due to the fact that it is notorious for stripping easily. Additionally, similar to the Star Drive style, it is difficult to find commercially. Potential sources of these types of screws include the VEX Robotics website and McMaster-Carr.
Phillips Head screws are not screws that are commonly associated with VEX Robotics, but they can be utilized conveniently due to the fact that they are incredibly easy to purchase. Normally, most hardware stores will sell their #8-32 screws with a Phillips Head style. Additionally, those hardware stores will almost certainly sell tools that are compatible with these screws. You can purchase these screws at a hardware store such as Ace Hardware, Lowes or Home Depot.
Most screws will be normal screws that have no additional benefit. However, there are three particular types of screws that can perform special tasks.
Shoulder screws are screws which are not threaded near the head. Usually, this lack of thread, referred to as the "shoulder", has a length that spans no more than 1/8 of an inch. The benefit of using a shoulder screw is that the shoulder is larger than the diameter of the threading. This means that, when passed through the hole of a C-channel or angle, the screw will always be nearly perfectly centered in the hole. This is excellent for any structural purpose, and should especially be utilized when constructing drivetrains to ensure that the drivetrain is "square" and aligned properly. Shoulder screws can be purchased in the Hex Drive variant from the VEX Robotics website or in the Star Drive variant from Robosource.
Locking screws are normal #8-32 screws that have thread locker brushed onto the ends of the screw's threading. They bring the added benefit of making the screw resistant to vibration, meaning that the screw cannot loosen unless a screwdriver interacts with it. They can be purchased from the VEX Robotics website with thread locker already brushed onto them, or they can be made by brushing any commercial thread locker, such as Loctite, onto an #8-32 screw.
While not particularly useful, VEX's thumbscrews offer a simplistic way to tighten screws. The method of tightening these screws is as the name suggests: they can be tightened by hand using the knurled head. One benefit that competitors have found within the thumbscrew is the fact that it is made of plastic compared to the typical stainless steel. This would make it a lightweight alternative to using any other screw. They can only be purchased from the VEX Robotics website.
These nuts are the least used in VRC, as they have no teeth to keep them tight without heavy maintenance, nor rubber to maintain their position on the screw.
The most common type of nut used in VEX, these nuts have teeth on the inner portion of the nut (the end that contacts the attached surface), which keeps the nut solidly in place without much maintenance.
Able to be used most everywhere without problems.
Nylock Nuts, or Nylocks, these nuts have a rubber ring on the top portion of the nut (that faces away from the attached surface), which keeps it in place on the screw. Able to be used in the same places as Keps Nuts, but generally should not be, as Keps Nuts are easier and more efficient to use.
Most commonly used in Screw Joints, as it is not advisable to tighten the outer nut on a screw joint all the way (this would stop whatever is on the joint from moving). Using a Nylock for this purpose allows the nut to retain its place on the screw, without needing to be tightened as far as it can go.
Standoffs are a fairly common part with a wide variety of use-cases in the VEX Robotics Competition.
Comprised of a long, threaded interior formed into a hexagonal shape, standoffs are often used to space pieces of structure over long dimensions, as screws can be threaded into either end of the cylinder. Due to their versatile dimensions, standoffs are often used in bracing components of a robot, and are sometimes used as main structural components themselves.
In the VEX Robotics Competition rules, there is a maximum length of 2.5 inches (63.5mm) for any commercially available standoff. Common sources of standoffs include the VEX Robotics website, RoboSource, and McMaster-Carr.
BLRS (Purdue SIGBots)
According to the current VRC rulebook, teams are allowed a certain amount of non-shattering plastic for use on robots. Any plastic that does not serve a function beyond decoration does not count towards the legal plastic limit. A piece is considered non functional if the performance of a robot or subsystem is not in any way altered by the removal of the piece(s). A piece that is used to shield game elements from entering or being stuck in a portion of the robot is considered functional.
Robots may use custom-made parts cut from certain types of non-shattering plastic. It must be possible to have cut all of the plastic parts on the Robot from a single 12” x 24” sheet, up to 0.070” thick.
Plastic parts do not have to be literally cut from the same original 12” x 24” sheet. However, all individual parts must be able to “nest” or rearrange into a 12” x 24” area.
Legal plastic (functional or decoration) types include polycarbonate (Lexan), acetal monopolymer (Delrin), acetal copolymer (Acetron GP), POM (acetal), ABS, PEEK, PET, HDPE, LDPE, Nylon (all grades), Polypropylene, and FEP. Shattering plastic (like acrylic) is generally not allowed.
RoboSource - https://www.robosource.net/plastic-sheets
Templating can be done in 2 ways but is critical for ensuring that custom plastic parts will fit well into the greater robot design.
Manual templating can be done on a sheet of graph paper where key aspects of the design are sketched out (cuts, bends, holes, etc.) and the overall outline is cut from the paper and measured against an existing mechanism. The template can then be traced onto a sheet of plastic & cut.
If the part, or entire robot, is being designed in a CAD program, then the face of the part can be exported, printed, and traced onto components. This is a great way to make more precise designs than may be possible with a pencil on paper, but without the need for additional tools like a laser cutter.
Nesting is the process of arranging multiple parts efficiently on a sheet of material to minimize waste, reduce cutting time, and optimize material usage. This is especially useful for fitting parts within a 12” x 24” area. However, maintaining proper spacing between parts is important to minimize thermal distortion or cutting defects.
Tutorial for Fusion 360 Extensions: Nesting and Fabrication - https://youtu.be/rVq4IdzaFlw?si=BEZIHB0E-Av_Fkcy
Specialized Software - https://deepnest.io/, https://nestingcenter.com/
To bend plastic, use a heat gun, first, securely clamp the plastic sheet along the desired bend line, ensuring it remains stationary. Gradually heat the bending area with the heat gun, moving it back and forth evenly until the plastic becomes pliable. Once softened, gently bend the sheet to the desired angle and hold it in place until it cools and solidifies in the new shape.
The basic process steps are also shown here:
Make sure this is done with proper PPE (gloves, safety glasses, pliers, etc.) and under adult supervision. Do this in a well ventilated area & don't use a hair dryer.
Plastic Gussets
Using plastic to create custom gussets or brackets can be very beneficial when constructing angles not supported by VEX parts, or when designing with odd measurements. Whether by use of CAD or tin snips, using custom gussets or brackets can often lead to a more precise, stable mounting solution.
Oftentimes, especially in drive trains, wheels are driven from gears, but the use of axles, or screw joints tends to allow for slop that is not wanted. To overcome this, it is a common practice to use additional bracing & hardware to attach the wheels & gears with improved rigidity in the joint.
Using stand-offs, it is possible to brace the core of most wheels against various gears. As shown below, 2 stand-offs act to apply torque directly to the wheel off of the face of the gear. These two points, along with the shaft itself, will reduce the slop in rotation.
Zip ties can be used, and are most commonly used with flex wheels. Making sure to evenly distribute zip ties & to overlap where possible will create the best outcome. Zip ties are not limited to only flex wheels & were a common way to reduce slop pre-V5
Pros
Cons
Easy to build
Lack of height
Very light
Cannot carry a large amount of weight
Does not take up a lot of space
Orientation at the end of the lift changes with lift angle.
Pros
Cons
Very compact and lightweight
Non-Linear Movement (of the lift)
Moderate buildability, with it being comparable to a 2-bar but slightly harder to build
The maintenance might be slightly harder due to the chain needing to be tensioned.
Maintains fixed orientation for the mounted mechanism, unlike a 2-bar.
There is a chance the chain may break
during a match.
Pros
Cons
Very Linear Movement
Mechanically inefficient due to surface contact
Very compact relative to a bar lift
Relatively hard to build due to multiple stages in the lift
Mounting point can be easily made a flat surface.
Maintenance is an issue, as reattaching the chain means looping it around multiple sprockets in potentially hard to reach areas.
Easy to tune force by changing the amount of rubber bands
Places a large amount of stress on the robot due to the tension of the rubber bands
Force stays consistent throughout a match
Rubber bands need to be replaced often outside of matches
Can be powered a variety of ways
Requires lots of force to draw the catapult back
Does not place constant stress on the robot
Difficult to tune for a specific firing distance
Does not require long terms purchases to maintain (unlike elastic catapults)
Force gets weaker as the catapult is used (air runs out)
Does not require much force to draw back
Is limited to a specific range of motion


We are aware that these links do not work anymore and we are currently working on a more future proof solution for fixing these year to year. Currently, Worlds 2024 links still work. Stay tuned!
If you have any proposed solutions for this other than replacing the links when they break, please do!
Opening Ceremonies
Arts Division (Day 1) (Day 2)
Engineering Division (Day 1) (Day 2)
Math Division (Day 1) (Day 2)
Science Division (Day 1) (Day 2)
Technology Division (Day 1) (Day 2)
Closing Ceremonies & Finals
Opening Ceremonies
Technology Division
Science Division
Design Division
Spirit Division
Research Division
Innovate Division
Opportunity Division
Arts Division
Math Division
Engineering Division
Closing Ceremonies & Finals
Opening Ceremonies
Math Division
Technology Division
Science Division
Engineering Division
Arts Division
Innovate Division
Spirit Division
Design Division
Research Division
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Divisions
Divisions
Divisions
Divisions
We are aware that these links do not work anymore and we are currently working on a more future proof solution for fixing these year to year. Currently, Worlds 2024 links still work. Stay tuned!
If you have any proposed solutions for this other than replacing the links when they break, please do!
Opening Ceremonies
Innovate Division
Spirit Division
Closing Ceremonies & Finals
Opening Ceremonies
Design Division
Research Division
Closing Ceremonies & Finals
Opening Ceremonies
Science Division
Technology Division
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Compressible wheels that are useful for intakes, flywheels, and even drivetrains.
Flex Wheels, formally known as "Straight Flex Wheels" are compressible cylinders with spokes made of a blend of rubber silicone. The compressible nature of the Flex Wheels makes them versatile for many use cases, such as intakes, flywheels, and drivetrains. Additionally, because their composition includes rubber, their coefficient of friction is higher leading to a significant amount of traction.
Flex Wheels are an unusual exception to other motion components: they do not utilize the typical square insert, but instead utilize a hex bore which is typically filled using a VersaHex as well as a VersaHub if it is necessary depending on the size of the Flex Wheel.
For VRC, Flex Wheels come in four sizes.
There is also a Flex Wheel with a 5 inch outer diameter, although this is not legal for VRC.
Each Flex Wheel has a given durometer reading, which measured how difficult it is to compress the wheel. There are three variants:
30A
Light grey in color
Easiest to compress
45A
For flywheels and drivetrain traction wheels, 60A Flex Wheels are typically ideal. However, for intakes, 30A Flex Wheels might be more ideal. 45A Flex Wheels do not have many use cases, however they could hold some merit for use on 1.625" Flex Wheels.
Because Flex Wheels utilize a hexagonal bore rather than a square bore, it means that you have to utilize unique methods to attach them to axles compared to any other motion component.
There are two types of adapters relevant to Flex Wheels: VersaHexes and VersaHubs. These two adapters are the most common method of attaching Flex Wheels to square axles. However, while VersaHubs and VersaHexes are reliable, they also may not be available always due to their consistent high demand.
The VersaHex Adapter is the primary adapter used for any Flex Wheel with an outer diameter smaller than 3 inches. The adapter is slightly larger than the hexagonal bore in the Flex Wheel, meaning the wheel has to be stretched a bit to allow the adapter to fit. This is easy to use on small wheels with durometer readings of 30A or 45A, but it may make it difficult for the adapter to fit on a very hard wheel like a 60A wheel.
VersaHex Adapters are also necessary to convert a VersaHub Adapter's hexagonal bore into a square bore.
The VersaHub Adapter is the primary adapter used for any Flex Wheel with an outer diameter of 3 inches or larger. It also is used in tandem with a VersaHex Adapter as its secondary adapter. Large Flex Wheels have large, circular holes in the center of them. The purpose of the VersaHub Adapter is to convert the large circular bore into a hexagonal bore, which then allows for the VersaHex Adapter to convert the hexagonal bore into a square bore. Unlike the VersaHex Adapter, the VersaHub Adapter is not as much of a friction fit, in the sense that it does not need to stretch the circular hole in order to fit. This makes it easy to fit a VersaHub Adapter into a hard wheel, such as a 60A 3 inch Flex Wheel, whereas it would be difficult to fit a VersaHex Adapter into a 60A 2 inch Flex Wheel.
It is possible to use common VEX components rather than VersaHexes and VersaHubs to create a square bore within a Flex Wheel. Typically, you would use a circular component that has an area for a high strength shaft insert (such as a square insert) to be placed inside of it. You would then fit the circular component into the Flex Wheel by stretching the wheel's circular bore with the component to create a friction fit.
One way to create a custom adapter would be to fit gears into the center of a Flex Wheel. For 3 inch and 4 inch wheels, a 36T High Strength Gear should suffice as a friction fit, although it should be noted that it would be incredibly difficult to fit it into a Flex Wheel with a hardness of 60A since a 36T High Strength Gear stretches the circular bore considerably.
For smaller Flex Wheels, a 12T Pinion is perfect as a friction fit in the hexagonal bore of the Flex Wheel. Additionally, this method does not stretch the bore as much as a 36T High Strength Gear would stretch the circular bore, so it may be possible to use this method with a small Flex Wheel that has a hardness of 60A.
Various hardware components can be used to create custom adapters. These usually don't deform the Flex Wheel as much unlike a press fitted custom adapter, making them easily compatible with wheels that have a 60A durometer reading.
Some useful components that could be used when creating a custom adapter include:
Lock Bars
Steel/Aluminum Plates
Polycarbonate when used in tandem with a laser cutter or CNC mill
3" and 4" Flex Wheels are manufactured with a 1" thickness, much too high for many use cases. Because Flex Wheels are made of silicone, they are very difficult to cut, so guides are often used to ensure a precise division and increase safety. 3D printed cutting guides for all Flex Wheel sizes can be found here: .
If you don't have access to a 3D printer, try making your own guides.
(Purdue SIGBots)
The 4 bar lift, the simplest linkage for keeping both ends parallel.
The four bar lift is one of the most used lifts in VEX Robotics competitions due to its relative simplicity and ease of building. The four bar lift is constructed using two sets of parallel bars that move up and down in unison. Two sets of vertical bars line both the front and back of the linkage, so that the lift can be attached to a robot base parallel to to object interaction mechanisms being attached.
In addition to the common parallel configuration, the two rotating bars may be mounting in a non-parallel fashion to provide a set amount of angle change on the lifted end of the lift throughout its range of motion. This can be used to adjust the angle of the linkage in its fully elevated state, in accordance with the design goals and game challenges.
One advantage of the four bar lift is how the lifted end will always remain parallel to the static mounting point through the entire duration of a lift or decent, with the exception of non-parallel mounting as mentioned previously. This helps prevent game objects from falling out of the object interaction mechanisms due the lift being inclined or declined. The simplicity of the design also makes four bar lifts very reliable and low-maintenance. Once one is constructed and set up, very little else is necessary to be done and the lift should continue to function without issues. The low number of moving parts allows little to go wrong during operation, and thus sensors and fail-safes are often not necessary.
Because four bar lifts are simple in nature, the linkage does not provide much height advantage. The maximum height of a four bar lift is determined by the length of bar used, which is constrained by the size limitations of the robot itself. While not common, four bar lifts may result in a center of gravity that does not remain over the base of the robot when faced with a heavy load. However, due to the size limitations, this is not often a problem.
Besides pressure from the pneumatic reservoir and electricity from the battery, elastic energy from rubber bands is a great way to augment the functions of a robot. Depending on the placement of the rubber band joints, you can achieve different amounts of friction and lift force on both the up and down stroke of a 4-bar lift.
As a general rule of thumb, if the rubber bands ...
decrease in length as the linkage moves, they provide force in support of that movement
increase in length as the linkage moves, they provide force against that movement
do not change in length by a significant amount, they are either
When the robot lifts an object, the rubber bands should decrease in length with the upstroke and increase in length with the downstroke. When the robot must lift itself (ex. grabbing onto a post and lowering the lift), the rubber bands should increase in length with the upstroke and decrease in length with the downstroke.
Desmos:
Different rubber band pivot positions provide more force perpendicular to the c-channels. The around the tower joints can be calculated from
where is the angle between and . Consider changing the following variables when refining the banding of the lift: number of rubber bands, rubber band pivot points, length of bars, etc.
Due to nonoptimal rubber band pivot positions or a really heavy lift, teams may be forced to put many rubber bands between a pair of c-channels leading to twisting or in the bars.
Possible Solutions
different rubber band pivot positions
screw joint bracing
For lifts which need a larger range of motion than a traditional parallel four-bar or need to change the angle of the end effector as the the input joint rotates, a non-parallel four-bar linkage can be used. To design a non-parallel four-bar, teams can prototype and experiment (recommended), utilize CAD software, or try models.
In addition to the widely used use-case of a vertical lift, four bar linkages can be used for many other applications. For instance, a four bar linkage can be rotated 90 degrees, to move with horizontal motion, rather than vertical. This can be used in many different scenarios such as subsystem deploy and passive mechanisms.
To help with budgeting for VRC teams, the following spreadsheet and breakdown record the finances of team 94999E through the 2020-2021 season, Change Up. As team 94999E was independent from a school or organization, this financial breakdown includes the start up costs that would be applicable to a new VRC team, as well as other expenses accumulated throughout the season.
*Costs are italicized if approximate
At 43.81% of the total cost throughout the season, purchasing VEX parts was the highest singular expense incurred when purchasing as a first year team. This high cost is mainly determined by the fact that a new team will need to purchase the total parts to build at least one full robot, rather than being able to build off of an existing supply. For teams that already have parts accumulated that are not being otherwise used, this cost should decrease by a notable amount.
Notable parts that were purchased include:
V5 Competition Super Kit
Two Additional Motors and One Extra Battery
Various Sensors
Additional Aluminum and Steel Structural Parts
While the listed parts do not cover the full cost of VEX Parts listed on the spreadsheet, they are the most notable costs that will need to be covered for a new team.
This expenditure consists of both game element kits, as well as the field element kit for the 2020-2021 season. It should be noted that the cost reflected on the spreadsheet does not include field perimeter and control items, as team 94999E did not use the field for hosting competitions, and was able to borrow the perimeters when necessary.
These kits, while very beneficial for testing robot functions, are not strictly necessary to compete, as VEX offers a guide, , to make custom variations of each kit. In addition, the dimensions of each game and field element are provided in the Field Specifications Appendix of the Game Manual, so a robot can be built without these kits if necessary. While this cost is a non-essential one, having the game and field element kits to practice and test with are very beneficial to a team's performance, if the budget permits.
This cost is highly variable, as the total cost for Tournament Registrations is highly variable dependent on the team's location and the amount of tournaments attended. In the 2020-2021 season, team 94999E registered for six in-person competitions and five live remote competitions, not including the State and World Championships.
In-Person Competitions
As In-Person Competitions are the bulk of what most teams will be attending throughout the season, this portion of the total registration cost should be the larger percentage. It should be noted that average tournament registration fees will vary depending on the region, so it is worth checking a region's RobotEvents page to get a better idea of the average price to register for tournaments.
For reference, team 94999E spent $580 of the $740 total cost for Tournament Registrations on In-Person tournaments.
Live Remote Tournaments
As recorded by team 94999E, this percentage is a bit of an outlier, namely due to the prevalence of Live Remote Tournaments being hosted in favor of In-Person Competitions due to circumstances of the season. It should be noted that costs to register for Live Remote Tournaments are generally lower than that of registering for In-Person Competitions, in addition to eliminating travel costs. Out of the total 11 events, both remote and in-person, and $740 spent to register, team 94999E spent $160 to register for five Live Remote Tournaments.
The registration fees for Regional and World Championships, as noted in the Cost Breakdown Spreadsheet, are comparatively much higher than those of local tournaments. While not every team will qualify for these events, it is better to have the money allocated in the event of a qualification. As with standard local tournaments, the price of these will very from region to region, as well as between seasons. It should be noted that the World Championship registration fee noted on the spreadsheet is an outlier, as the registration fee was lowered for the Change Up season. The fee has since been increased to $1200.
Signature Events are a multi-region format of tournament that qualify teams directly to the World Championship. It should be noted that these events are typically priced in the range of Championship Events, rather than local tournaments, in addition to typically being run as multi-day events causing a raise in travel costs.
As listed on the spreadsheet, this was the single largest expenditure category for team 94999E in the Change Up season outside of parts, totaling to 25.35% of the total. The relatively high number presented can be attributed mainly to the majority of competitions attended being out of state, requiring overnight stays in hotels, in addition to gas spent when driving the longer distances. For reference, of the six In-Person Competitions registered for, four were out of state tournaments due to the circumstances of the season.
The budget allocated for tools, in 94999E's case, was largely comprised of one time costs purchasing various necessary tools. Although the price of each tool was not recorded, the tools were generally inexpensive models purchased from a local hardware store:
Various T15 and T10 screwdrivers
Vice Grip
Dremel
Heat Gun
Realistically the most inessential expenditure on this spreadsheet, marketing material consisted of printing stickers of the team logo, as well as shipping costs to mail stickers, in addition to team shirts in the case of team 94999E. While this cost is not essential and can be eliminated if necessary, having team shirts and a marketable brand is very beneficial towards growing the team.
The standard fee for registering a VRC team is $150 through RobotEvents, though this cost decreases to $50 for each subsequent team registered in an organization. For instance, team 94999E, the first team registered, would cost $150, while teams 94999X, 94999Y, and 94999Z would cost $50 each to register. This cost is annual, as team registrations need to be renewed on a season-by-season basis.
(Purdue SIGBots)
(Yokai Robotics)
For this article, we will be discussing live streaming through OBS. OBS will allow streaming to most major platforms with all of the same setups. It is assumed that a general understanding of OBS is had, and the basics can be found here:
Ensure that the venue's network will both allow the ability to stream and has sufficient bandwidth to ensure a low latency stream. Most school networks are acceptable, but check the stream host's documentation for precise network bandwidth requirements.
Unlike traditional web live streams, robotics event live streams have multiple cameras, each of which are dozens of feet from each other. Typically, an event partner will place at least one camera at each field, and a wider event/awards camera. There are several approaches to connecting these cameras to the live stream computer.
Many cameras will offer an HDMI out signal, which can be an efficient way to achieve a low-latency stream. Before purchasing, ensure that the cameras that will be used have a clean HDMI out signal. Additionally, several 50ft HDMI cords may be needed, which is the maximum length that can be reasonably gotten without signal degradation or the need for an active extension.
GoPros provide a great option for live streaming robotics events, due to their cost and wide field of view. If GoPros are purchased, try to purchase a Hero 8 or newer. In this version, the USB C port can be directly connected to a computer and be used as a web camera, which can provide flexibility for additional cameras. In most cases, older models are acceptable.
Connect the micro-HDMI port to an external switcher or capture card. For most competition purposes, the Blackmagic ATEM Mini is an acceptable option. The ATEM Mini Pro is a slightly more expensive alternative but would allow streaming directly from the switcher without a dedicated streaming computer.
The GoPros may need to be modified to ensure they don't overheat during a long competition day. Overheating cameras can be identified by intermittent black outs of video output.
Remove the battery and leave the battery compartment open
Disable H.264. In Video Compression, Select HVEC. The older encoding is not needed for our purposes and only increases temperatures
Disable Wifi Configuration
Set video mode to 1080p60
If the venue is particularly warm, invest in heat sinks to ensure that the cameras are properly cooled. Some Event Partners have found success in repurposing Raspberry Pi heatsinks. Target the area of the GoPro directly below the sensor, but experimentation with each particular model is warranted.
Another approach is to use a PoE network camera, which are commonly produced as security cameras. This approach is significantly more flexible than HDMI cameras, but careful considerations must be made to ensure access to a low-latency stream from the cameras.
Camera:
To obtain a low-latency stream from the cameras, we will use a tool known as OBS-gstreamer:
Here are some troubleshooting tips:
Once everything is installed, it may still not get the GStreamer Source to show up in OBS if Windows isn't finding the GStreamer framework. This may be caused by the framework not being in the Windows PATH environment variable. The fix I found was launching OBS with a batch file that mounts GStreamer to PATH when run. The steps for this fix are as follows:
Create a new file called start_obs.bat. Make sure that the file extension is .bat. Add the following code to the file:
Save the file. and play around with the format of the RTSP stream for a while before it works. Try this syntax uridecodebin uri=rtsp://admin:[email protected] ! queue ! video.
All the checkboxes are cleared in the GStreamer source properties except for the very last one (Clear image data after end-of-stream error)
Note: thanks so much to Nathan Nolte for his advice with this setup!
USB webcams are often times cheap, and readily available. There are some limits to a USB webcam though. First, most PC/Mac USB ports can only use one webcam, or two with a hub. Because of this, streams with multiple fields, or multiple angles, may need to add additional hardware. Second, USB cables can usually only span about 20'-30' without additional hardware.
Camera:
USB Extension Cable:
USB-Ethernet Hub:
With this setup, 2 cameras connect via the extension cables to the ethernet hub that will allow both cameras into 1 usb port with an extension via cat5/cat6 ethernet up to 100'.
This has been tested a few times in competition by SIGBots and has been the least problematic.
Audio is one of the most important aspects of the stream, and distinguishes a functional stream from an excellent one. Event Partners will likely need to purchase a USB Audio Interface to connect the venue's microphones to the live stream. To minimize copyright strikes on the streams, be sure to only capture the Emcee's microphones and Tournament Manager's Audio, and exclude any music that may be playing in the venue. It is best practice to mix in stream-friendly music through OBS. It is also possible to pipe Tournament Manager Audio into OBS instead of capturing it from the venue's audio mixer.
Below is a recommended plugin for OBS (Win 64) in order to automate much of the work for linking TM and OBS. This is a third-party plugin and is not officially supported by RECF or Vex however it was designed by an employee of the company that designed TM and is one of the best community products to link the two platforms.
It is recommended to follow the installation and setup instructions given by Mr. Flowerday.
Below is a recommended tool that can be used to automate many of the aspects of a robotics live stream, including field switching, showing saved match scores, and automatically recording matches.
Some notes from SIGBots after use of the switcher:
Make sure TM is running on port 80. Port 8080 will not work. Often, there is a service called World Wide Web Publishing that takes port 80 and should be ended before starting TM.
The plugin in requires using at least OBS v28, which integrates a new WebSocket control system.
If you are using the switcher with an ATEM device, you will need to connect your switcher to the network, as switchers connected via USB cannot be remotely controlled. See guide on connecting your switcher to the network. Input the same address you would use to connect to the switcher via the ATEM Control Software.
Brendan McGuire




1"
VersaHub & VersaHex
Grey in color
Compresses moderately
60A
Black in color
Incredibly difficult to compress
1.625"
0.5"
VersaHex
2"
0.5"
VersaHex
3"
1"
VersaHub & VersaHex





Lock Bar
BLRS

1x5 Flat Bar
91A

Polycarbonate
81P

Polycarbonate
9364E



4"
Transportation, Lodging, Food
$1,940.00
25.35%
Tools
$75.00
0.98%
Marketing Material
$150.00
1.96%
Team Registration
$150.00
1.96%
Total Cost
$7653.25
100%
More Wheel Types
Additional Gears and Sprockets
Misc. Other Parts
Sheet Metal Shears
Safety Glasses
VEX Parts
$3,352.58
43.81%
VEX Game/Field Elements
$645.67
8.44%
Tournament Registration Fees
$745.00
9.73%
State Championship Registration Fee
$100.00
1.31%
World Championship Registration Fee
$495.00
6.47%








internally resolving the forces as friction or heat and resisting any change in movement.
double-sided banding
Pros
Cons
Easy to build
Lack of height
Reliable/Low Maintenance
Center of gravity is not over the base of the robot (robot could tip when carrying heavy load)
Lifted end is parallel to static mounting point, preventing objects from falling out
Lift design is constrained by size of robot


Larger range off motion
Angle changes as DR4B rises


Set field of view to the widest setting
Disable video stabilization
Utilize compressed air to cool camera
Make sure the latest LTS version of NodeJS is installed if you are running the program from source.
Using the program via source is ideal and more consistent if you have NodeJS installed.












We are aware that these links do not work anymore and we are currently working on a more future proof solution for fixing these year to year. Currently, Worlds 2024 links still work. Stay tuned!
If you have any proposed solutions for this other than replacing the links when they break, please do!
Opening Ceremonies
Arts Division (Day 1) (Day 2)
Design Division (Day 1) (Day 2)
Engineering Division (Day 1) (Day 2)
Math Division (Day 1) (Day 2)
Science Division (Day 1) (Day 2)
Technology Division (Day 1) (Day 2)
Closing Ceremonies & Finals
Opening Ceremonies
Arts Division
Engineering Division
Math Division
Opportunity Division
Science Division
Technology Division
Closing Ceremonies & Finals
Opening Ceremonies
Engineering Division
Arts Division
Innovate Division s
Spirit Division
Design Division
Research Division
Opportunity Division
Closing Ceremonies & Finals
Parade of Nations
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Skills Finals
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Opening Ceremonies
Divisions
Closing Ceremonies & Finals
Policies that sound great on paper, but play out terribly in real life!
This article is intended to guide and advise newer advisors or coaches on policies that sound awesome on paper but when put in practice, play out terribly for one reason or another. Please heed the warnings in this article and prevent your team from succumbing to the same fate that these real policies have had on certain teams.
All if not most of these policies have been tried on a team in Southern California, and if you are a mentor who has implemented these policies we highly encourage a reconsideration of these policies.
Why this sounds great on paper:
Rotating team roles (programming, notebooking, mechanics, etc.) is something that might be very tempting for a mentor to do as on paper. The reasoning behind this policy is that each member gets to touch the robot in various different ways that having one role wouldn't.
Here's an illustration of what this could look like:
In Practice
Instead of depth in understanding for each role, each member is suddenly lukewarm at each task.
To understand why, let's break down what each member is forced to do:
Only be a certain role the fraction of a time while they are on the team. The amount of time each member is allocated with this role is (1 / N), where N is the number of team members on the team. To illustrate this, let's take a team of 3 people over the course of 4 weeks with the programmer bolded:
As demonstrated above, the Member 1 must wait 2 weeks before being the programmer again. On a 6-8 person team, this can be 5-7 weeks. For somebody to stop working on something for a large amount of time like that and then pick it back up much later is incredibly hard, and unrealistic to how an engineering firm would work. We must remember that as mentors and engineers one key tenet of what we do is preparing students for industry and college.
Furthermore, not each member is cut out or willing to do each task. Forcing somebody out of their comfort zone as a coach on a certain task is not ideal nor does it lend to an enjoyable time for either the team member or the team as a whole.
It should also go without saying, having students be lukewarm at each role also reduces the competitiveness of the team as a whole. The separation of responsibilities between team members also becomes blurred when roles are switched regularly, especially at competitions where each team member's role determines what their chaotic day looks like. Switching their set of responsibilities between competitions reduces efficiency in doing these tasks and causes confusion.
What Should Be Done Instead
If your goal is to allow students to switch roles or get a general understanding of different types of engineering disciplines, here are several things that can be done:
Encouraging students to take a different role each season until they find the type of engineering that they prefer.
Having students teach each other, but still have dedicated roles with a separation of responsibilities.
One thing that goes without saying, is that mentors should be encouraging of these roles being developed on each team rather than forcing them unnaturally onto each group.
At the end of the day, when a high school student becomes a university student, they aren't going to be majoring in "General Engineering". Finding a specific discipline within the broad field of engineering and then focus it down even more is invaluable in their high school years for choosing a specific major. By forcing kids to have breadth instead of depth, they are less prepared than their peers who have become incredibly skilled or interested in one specific discipline.
Why this sounds great on paper:
To avoid team drama with drivers, some mentors or team leaders may opt to change their driver every match. The idea behind this is so that every member gets the same amount of time driving and thus nobody is truly the "main person" in the spotlight when they go up and control the robot.
Plus some parental pressure may also influence this change to occur.
In Practice
In both VRC and FRC, a driver on a team ideally has had the most time and effort put into driving the robot outside of the technical aspects of it. This comes down to somebody who has good perception and has gotten a lot of time drive practicing the robot before the competition.
By forcing each team member to rotate the driver each match, the same issue with rotating team roles becomes apparent. Each driver has 1 / Nth (where N is the number of the members on the team) of drive practice in the most ideal situation. In most circumstances, you end up with somebody with no drive practice driving for a qualification match. It goes without saying that this is less competitive than having one person with the entirety of the drive practice time.
This is even more of an issue when it comes to the driver skills challenge, where dedication to practicing a set routine is paramount for success.
What Should Be Done Instead
To address the "fairness" aspect of driving, there should be no glorification of driving the robot. It should be seen as a responsibility that somebody has to take and dedicate many hours to in order to be proficient with the robot. Another thing to mention, is that drivers tend to not be glorified anyways on the field of competition as the centerpieces are the robots.
Driver tryouts and strict regiments for drive practice should be established on each teams to make students empirically pick the right member to drive. This can be done with a pre-established course or skills run and should be done as soon as the robot is fully functional 2-4 weeks in advance to the competition so that enough time is allocated for drive practice.
As mentors, it's also important in this case to have a heart to heart with students that may be upset about not being chosen to drive. Dealing with rejection and decisions that do not align with ones ideals is a fundamental part of an engineer's development.
Why this sounds great on paper:
Keeping the same robot between seasons means that disassembly of the robot isn't necessary, and parts can be saved between seasons. It also means that all work (programming and building) the chassis and other subcomponents can be kept between seasons!
In Practice
This is a terrible idea for many reasons, as reality really hits hard against this policy.
For starters, mechanical fatigue and general maintenance tends to get worse the longer you keep a robot around. Shaft collars inserts wear out, screws get loose, and after competitions metal tends to be weaker. For this reason, some teams (time willing) will do rebuilds (not redesigns) between lulls in competitions to prevent mechanical wear and tear becoming a major issue.
Another issue is the fact that design year to year may vary greatly. Different games may have different obstacles and hazards for robots to climb or navigate across.
Here are a couple of examples:
Even if the games might be similar enough, the tolerances, foundations, and mounting points for different subsystems between games are crucial for success in robotics. To modify an existing design with intended features will always be harder and less competitively effective than building a purpose made design from the ground up. This also robs a learning opportunity from newer team members who do not have the chance to build a chassis from the ground up that year.
Why this sounds great on paper:
As an adult mentor or coach, you're always right! Especially if you have an engineering degree. Besides, the kids are there to learn from you and your hard dedicated time. Therefore, you should always have the final say.
In Practice
As a mentor, the most ideal situation is to form comradery and trust between you and your students. Talking down to students does not do anything constructive and only creates animosity that can't be solved in the short term unless there is a massive change in behavior.
If anything, students are even less likely to be willing to try new things or be open ears to new ideas due to the animosity.
By shutting down short term discourse, you are killing long term relations and good will. Maintaining good relations with current members means willing alumni who are willing to come back to mentor and/or donate.
What Should Be Done Instead
Effective mentorship can be achieved by promoting a collaborative environment where students feel valued and respected. It is paramount to foster an atmosphere where students feel comfortable sharing their thoughts and ideas without fear of judgment by legitimately considering their ideas instead of becoming defensive from the get-go just because there is opposition to your idea.
That being said, the kids aren't perfect. There is a balance to reach with talking down on them and being too passive, especially because mentors aren't perfect either.
Why this sounds great on paper:
Alumni come into the classroom and socialize with students too much, it's annoying and sometimes they seem to reduce the amount of time students are spending working on their robots by conversing and talking with them. Therefore, banning the alumni (who are adults and probably should have something better to do anyways?) is a necessary step to ensure that students stay concentrated on their robotics.
Another issue is that we don't want current team members going off and mentoring other teams, they are wasting valuable time doing that and might be taking their parts. Let's just ban current team members from doing that too.
In Practice
While it's reasonable to tell alumni to visit less if their visits become too frequent (or ban certain ones for professional or safety reasons), banning alumni as a whole from visiting is a net detriment to an organization, both middle and high school.
Each alumni, no matter how many years detached being willing to either mentor, donate, or talk to children can be an asset to the organization. Showing current students how current activities on the team can lead to life changing results and entire careers can be incredibly motivating and insightful for the tumultuous years of college and beyond that are just ahead of them. As long as their technical insight and mentoring are within "student-centric" bounds, this insight is invaluable for students.
What Should Be Done Instead
Rather than outright banning alumni, a structured alumni visitation schedule should be implemented. This allows alumni to share their experiences and expertise in a controlled manner that minimizes disruption. Set specific times for alumni to engage with students, ensuring these sessions are focused on mentorship and learning.
At the end of the day, clear cut and respectful communication for what is expected of the alumni is important for maintaining good relations and allowing those who want to visit do it in a healthy manner. Expectations should be set outright and be flexible for those wanting to help and visit.
The same applies to team members who want to go off and mentor younger students. This is not only invaluable for students who might join your organization later, but also the students who do go and serve to mentor. Nothing reinforces knowledge as much as teaching said knowledge. Furthermore, the reputation of a team is tightly coupled with their outreach activity.
By having team members who are willing to go out and mentor, this creates a general sense of positivity towards a team at competitions which may come in handy during alliance selections or judging. In fact, most coaches have to go out of their way to convince students to go out and mentor other teams or do other forms of outreach.
The biggest indicator of a policy being an issue is a sizeable amount of students going off to form or join private teams at the end of a season, especially if you are a public school team.
In essence, quitting members of a public school team are saying: "We would rather take a substantial financial burden than stay on the a public school team that is cheaper year to year".
Other indicators may be students not wanting to talk with a mentor and being overly rebellious.
(Purdue SIGBots)

cd /D "%~dp0"
cd gstreamer
SET GSTREAMER_1_0_ROOT_MINGW_X86_64=%cd%
cd bin
SET PATH=%cd%
SET GST_PLUGIN_PATH=%cd%
cd..
cd..
cd bin
cd 64bit
start obs64.exeOpening Ceremonies VIQRC Opening Ceremonies
Design Division Practice & Qualification Matches Qualification Matches (Day 1) Qualification Matches (Day 2)
Innovate Division Practice & Qualification Matches Qualification Matches (Day 1) Qualification Matches (Day 2)
Opportunity Division Practice & Qualification Matches Qualification Matches (Day 1) Qualification Matches (Day 2)
Research Division Practice & Qualification Matches Qualification Matches (Day 1) Qualification Matches (Day 2)
Spirit Division Practice & Qualification Matches Qualification Matches (Day 1) Qualification Matches (Day 2)
Closing Ceremonies & Finals VIQRC Closing Ceremonies and Finals
Opening Ceremonies VIQC MS Opening Ceremonies
Arts Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards Design Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Engineering Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Innovate Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Math Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Opportunity Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Research Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Science Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Spirit Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Technology Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Closing Ceremonies & Finals VIQC MS Closing Ceremonies and Finals
Opening Ceremonies VIQC MS Opening Ceremonies
Math Division Practice & Qualification Matches Matches, Playoffs & Awards
Technology Division Practice & Qualification Matches Matches, Playoffs & Awards
Science Division Practice & Qualification Matches Matches, Playoffs & Awards
Engineering Division Practice & Qualification Matches Matches, Playoffs & Awards
Arts Division Practice & Qualification Matches Matches, Playoffs & Awards
Innovate Division Practice & Qualification Matches Matches, Playoffs & Awards
Spirit Division Practice & Qualification Matches Matches, Playoffs & Awards
Design Division Practice & Qualification Matches Matches, Playoffs & Awards
Research Division Practice & Qualification Matches Matches, Playoffs & Awards
Opportunity Division Practice & Qualification Matches Matches, Playoffs & Awards
Closing Ceremonies & Finals VIQC MS Finals and Closing Ceremonies
Opening Ceremonies VEX IQ Parade of Nations
Closing Ceremonies & Finals VEX IQ Finals and Closing Ceremonies
Opening Ceremonies VEX IQ Parade of Nations
Closing Ceremonies & Finals VEX IQ Finals and Closing Ceremonies
Opening Ceremonies VEX IQ Parade of Nations
Closing Ceremonies & Finals VEX IQ Finals and Closing Ceremonies
Divisions VIQC Middle School
Divisions VEX IQ Challenge
Divisions VEX IQ Challenge





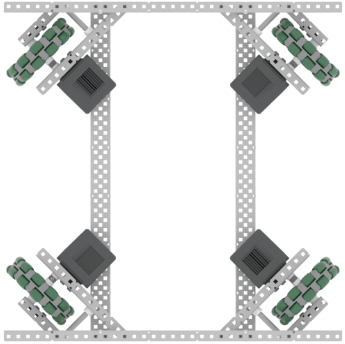
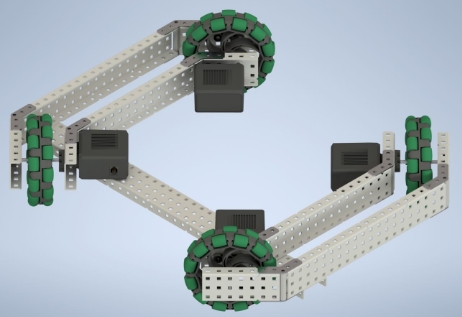
Mechanic 1
Mechanic 2
3
Mechanic 2
Electrical
Programmer 1
Notebooker
Mechanic 1
4
Programmer
(some role 2)
(some role 1)
1
Programmer 1
Notebooker
Mechanic 1
Mechanic 2
Electrical
2
Electrical
Programmer 1
1
Programmer
(some role 1)
(some role 2)
2
(some role 1)
Programmer
(some role 1)
3
(some role 2)
(some role 1)



Notebooker
Programmer
























Opening Ceremonies V5RC (HS) Opening Ceremonies
Science Division Practice & Qualification Matches Qualification Matches
Technology Division Practice & Qualification Matches Qualification Matches
Engineering Division Practice & Qualification Matches Qualification Matches
Arts Division Practice & Qualification Matches Qualification Matches
Math Division Practice & Qualification Matches Qualification Matches
Design Division Practice & Qualification Matches Qualification Matches
Research Division Practice & Qualification Matches Qualification Matches
Innovate Division Practice & Qualification Matches Qualification Matches
Spirit Division Practice & Qualification Matches Qualification Matches
Opportunity Division Practice & Qualification Matches Qualification Matches
Closing Ceremonies & Finals Finals, Closing Ceremonies, VRC Game Unveil
Opening Ceremonies VRC HS Opening Ceremonies
Design Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Engineering Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Innovate Division Practice & Qualification Matches (Part 1) Practice & Qualification Matches (Part 2) Qualification, Playoffs, & Awards
Opportunity Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Research Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Science Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Spirit Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Technology Division Practice & Qualification Matches Qualification, Playoffs, & Awards
Closing Ceremonies & Finals VRC HS Closing Ceremonies and Finals
Opening Ceremonies VRC HS Opening Ceremonies
Math Division Practice & Qualification Matches Matches, Playoffs & Awards
Technology Division Practice & Qualification Matches Matches, Playoffs & Awards
Science Division Practice & Qualification Matches Matches, Playoffs & Awards
Engineering Division Practice & Qualification Matches Matches, Playoffs & Awards
Arts Division Practice & Qualification Matches Matches, Playoffs & Awards
Innovate Division Practice & Qualification Matches Matches, Playoffs & Awards
Spirit Division Practice & Qualification Matches Matches, Playoffs & Awards
Design Division Practice & Qualification Matches Matches, Playoffs & Awards
Research Division Practice & Qualification Matches Matches, Playoffs & Awards
Opportunity Division Practice & Qualification Matches Matches, Playoffs & Awards
Closing Ceremonies & Finals VRC HS Finals and Closing Ceremonies
Opening Ceremonies VRC Parade of Nations
Divisions Science Division Technology Division Arts Division Math Division Engineering Division Research Division
Skills Finals VRC Skills Finals
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Parade of Nations
Divisions Science Division Technology Division Arts Division Math Division Engineering Division Research Division
Skills Finals VRC Skills Finals
Division Round Robin / Playoffs VRC HS Round Robin
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Parade of Nations
Divisions Science Division Technology Division Arts Division Math Division Engineering Division Research Division
Skills Finals VRC Skills Finals
Division Round Robin / Playoffs VRC HS Round Robin
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Opening Ceremonies
Skills Finals VRC Skills Finals
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Opening Ceremonies
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Opening Ceremonies
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies
Opening Ceremonies VRC Opening Ceremonies
Closing Ceremonies & Finals VRC Finals and Closing Ceremonies












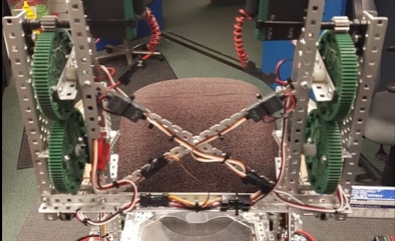



Shooting things and busting encoders
A flywheel is a mechanism that is designed to store rotational energy as efficiently as possible. This is done by spinning a wheel or disk at very high speeds with very little friction. In VEX, the main application is to launch objects long distances. They are often chosen over other shooting mechanisms for their ability to shoot at variable distances and with variable forces.
To control any type of flywheel, you have a few options. You can either max out the voltage/velocity, but if you would not like the maximum force of your motor, it is highly recommended to use a PID controller to keep the speed of your flywheel consistent. Without a PID controller, your flywheel will be in a loop of over and undershooting the speed, causing inaccurate results.
A single flywheel is by far the most common flywheel used in Vex because of its consistency and accuracy. Single flywheels use a single wheel spinning at high RPMs with a back plate (most commonly Lexan or ABS). The back plate is formed around the wheel and tuned for the right amount of compression (varies based on the object being fired) and cut to the desired launch angle of the object. The biggest benefits of single flywheels over double flywheels are their consistency, reduced use of motors, and distance because of greater backspin. They're consistent because of their back spin with the plate, and only tuning of one motor.
Single flywheels were the dominant design of Nothing But Net. Below is a picture of 1104M in the world finals with a single flywheel (3/6 finals teams in NBN were 1104 with essentially the same robot).
This flywheel spun at extremely high RPMs and had the majority of the wheel’s mass on the very outside of the wheel which increased its moment of inertia thus making it easier to fire several balls in succession. This was paired with a ratchet and pawl that allowed the wheel to coast with no motor power and maintain most of its speed.
Single flywheels were also common in Turning Point where the main goal was precision and power. Robots like 169A chose flywheels because they are very consistent, and allowed for quick double shots (especially later in the season). 169A’s robot is shown below.
This robot used many mechanics similar to what 1104 did in NBN. The biggest innovation of this robot was the addition of an angle-changing hood. This hood allowed for the robot to shoot 2 flags(of different heights) very quickly and very accurately.
Both above robots can be found in CAD designs . (Courtesy of Zach from 929)
A Double flywheel is similar to a single flywheel but instead of a backboard has another rotating wheel. These wheels are often placed horizontally next to each other (but have also been done vertically). They are much more advanced and allow for more tuning, most commonly changing the speed of a wheel to adjust the projectile’s path. When vertical, the wheels can have different speeds that allow for more/less backspin to make the object fly at different distances. Double flywheels are larger, and heavier, but most importantly need more compression because of the reduced contact time with the ball. This means that they take longer to spin up and put more strain on the motor. Double flywheels generally consume two motors, but can also be configured to only use one motor with a clever gearing scheme. In a one motor configuration, a seperate gear train is required to make sure the wheels are spinning in opposite directions.
Below is VCAT Robotic’s nothing-but-net early season 15” VexU robot. It is one of the better-known double flywheels. They did however change the design soon after this to use a single flywheel.
Release adjusters deflect the game objects after it exits the flyhweel. They were commanly called angle shifters in Turning Point and bloopers or deflectors in Spin Up.
Before spending too much time on refinement, make sure the build quality of the flywheel is satisfactory. A well-built flywheel with no refinement should still be relatively consistent (even if it performs poorly). Because flywheels rotate at such high angular velocities, faults in build quality and programming will be significantly more apparent as they attempt to approach their top speed. Ensure that the structure of the flywheel is properly aligned, bearings are fully seated, and no shafts are bent to establish an efficient flywheel mechanism.
Test and quantify the metrics of the flywheel.
Change a parameter.
Remeasure metrics.
Analyze results.
When a flywheel , it likely occurs because the flywheel is unevenly balanced or the shafts are not aligned properly or worn out.
Flywheel balancing is a process that evenly distributes the mass of the wheel to prevent vibration or wobbling during operation. Balancing typically involves adjusting the weight distribution of the flywheel by adding or removing material, or by using counterweights, to achieve equilibrium and minimize vibrations.
Spin the flywheel at a constant input voltage or constant input rpm.
Measure the vibration through the following options. More useful metrics like flywheel speed and power usage can also be measured here.
Use a mobile phone app. Tape the phone to the robot (near as possible to the flywheel) if necessary.
Below are 3 sample tests of many to show the effect of weight distribution on a flywheel (81P Spin Up)(2/18/23).
VEXMEN: Archangel
81P VEXMEN: Pandemic
(Purdue SIGBots)
Landing Distance
(m)
Distance from the robot to where the projectile lands correlated with projectile speed
Projectile Speed
(m/s)
Speed at which the game object exits the robot
Edge Material
N/A
Material at edge of wheel and surface of backing material
Examples:
Anti-slip mat
Foam
Silicone (flex wheel)
PARAMETERS
--------
Variables that affect metrics
Edge Velocity
v (meter / second)
Tangential velocity at edge or disc
v = r x ω
I (kg * meter^2)
For discs in general:
For most usable shapes: I ∝ m*r^2
For : 0.3865 [lb in^2], 1.131 *10^-6 [kg * m^2] Increasing moment of inertia increases start up time, decreases rebound time, and increases precision.
Type and Tuning Parameters
N/A
Motor controllers often have tuning parameters that change how the motor responds to sudden drops in speed (like when shooting a game object). A properly tuned control algorithm can artificially maximize the angular velocity while it accelerates. This can decrease spin up time.
Overview Article:
Examples:
- threshold
- kp, ki, kd
- kp, ki
Compression
N/A
How much does a game element compress when it travels through the flywheel?
For single flywheels, compression increases as the distance between the
backing and the flywheel decreases. For double flywheels, compression increases as the distance between the flywheels decreases.
/ Stiffness
depends on material meta-parameter
Grip
N/A
How well does the flywheel and backing material hold on to the game element without slipping?
Depends on material meta-parameter Increasing grip increases the spin of the game element.
Use the VEX Inertial Sensor. Save the accelerometer data to a csv file / SD card.
Try feeling the vibration with a finger near the flywheel (be safe).
Quantify the vibration by analyzing accelerometer data.
Estimate the amplitude of the vibration waveform.
Vibrometer gives an "Average" reading in the app.
PhysicsToolbox or the VEX IMU allow users to export data to a csv file. From here, there are many methods to estimate the degree of vibration.
Frequency analysis can also be done through a Fourier or wavelet transform. Shifts in frequency often correlate with shifts in flywheel speed. This depends on the resonant frequencies of the robot.
Add or move a counterweight on the flywheel.
Repeat from step 1 until the the vibration is sufficiently low, flywheel speed is high enough, or power usage is lower, etc.
Power Usage (Watts)
8
7
6-7
Average Acceleration Amplitude (m/s^2)
0.6
0.2
0.2
Power Usage
P (Watt)
Power (energy/time) used to maintain operational speed
Correlated with friction in flywheel system Generally, the less power usage, the better, since it means that the motor is not working as hard to maintain the speed of the flywheel and will thus be less likely to overheat or have unpredictable behavior.
Start/Spin Up Time
(second)
Time duration between an unmoving wheel and reaching operational speed
Rebound Time
(second)
Time duration between shooting a projectile (or multiple) and reaching operational speed
After shooting each projectile, the rpm will decrease quickly, then pick back up.
Accuracy & Precision
measurement / testing depends on current game
META-PARAMETERS
--------
Parameters that affect other parameters
Operational Speed
ω (RPM or rad/s)
Desired angular velocity for the flywheel to be running at for the match
Usually not the max RPM the motor is capable of to reduce power usage, heat, rebound time
Optimal velocity to shoot game objects
Often called "set point" in program control
Weight
m (kg)
Weight of disc
Dimensions
(meter)
Flywheel Balancing Configuration
6 aluminum nylocks
6 aluminum nylocks and 1 keps nut at hole index 2/6
6 aluminum nylocks and 1 steel nylock at hole index 2/6
Test Duration (s)
25
12
36
Angular Velocity (RPM)
570 (on screen)
3420 (real)
590-600 (on screen) 3540-3600 (real)

91A

169A

315G

96969Y

BLRS2

4082B











Radius/diameter and thickness of disc
590-600 (on screen) 3540-3600 (real)
flywheels
hoods in Nothing but Net and Turning Point
game elements in Nothing but Net and Spin Up
backings in Spin Up
Examples
If a 4" Nothing but Net ball (foam) must fit through a a 3.65" gap, it will bend or compress the backing material and/or itself by a total of 0.35".
If a 3" Turning Point ball (plastic) must fit through a 2.8" gap, it will likely bend or compress the backing material by 0.2".
Relations
Higher compression increases precision and decreases projectile exit speed.
Notes
Compression can have varying effects based on build quality.
Too much compression will bend the supports or flywheel shafts